Research Assistant Professor
Shanghai Jiao Tong University, School of Artificial Intelligence
上海交通大学人工智能学院 助理研究员, 博士生导师
Member of Machine Vision and Intelligence Group (MVIG) at SJTUEmail: siriusyang at sjtu dot edu dot cn
Office: Bldg. SAI, No. 1954 Huashan Rd., Xuhui Dist., Shanghai, 200230, China
About. I’m a Research Assistant Professor in Shanghai Jiao Tong University (SJTU),
affiliated with the School of Artificial Intelligence
(SAI),
where I joined in September 2024.
I obtained Ph.D. degree in Computer Science from SJTU in 2023, advised by Prof. Cewu
Lu at the Machine Vision and Intelligence Group and
M.S. degree in Mechanical Engineering, SJTU.
My research interests include 3D Vision and
Robotics.
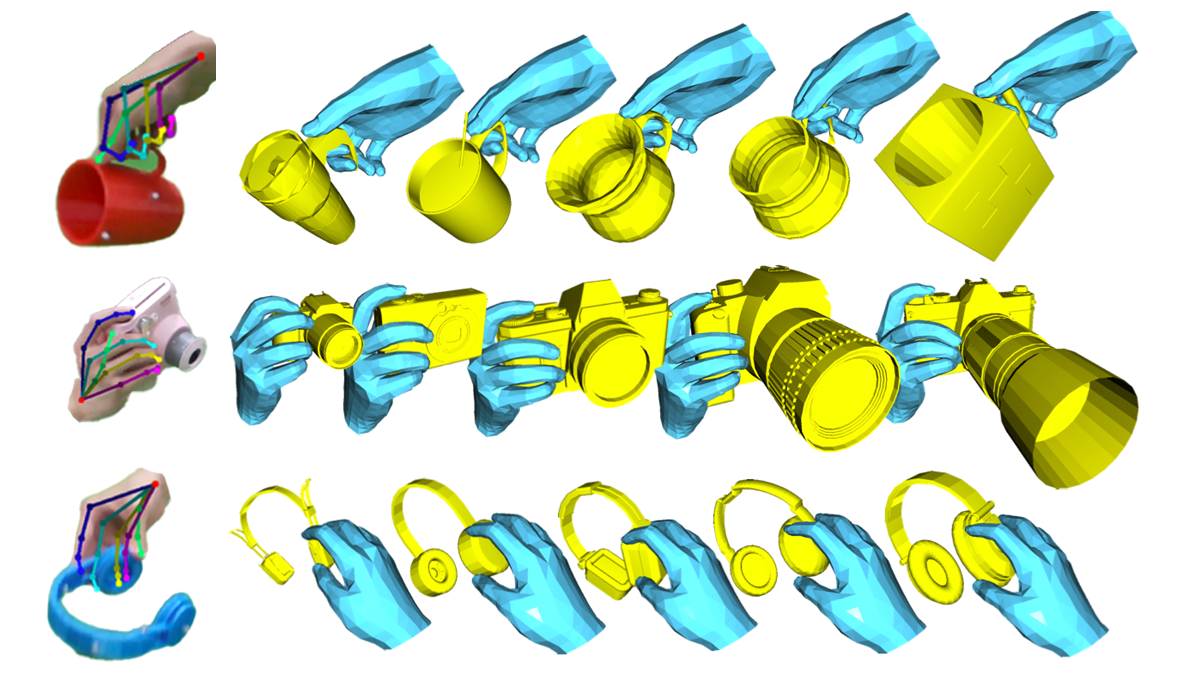
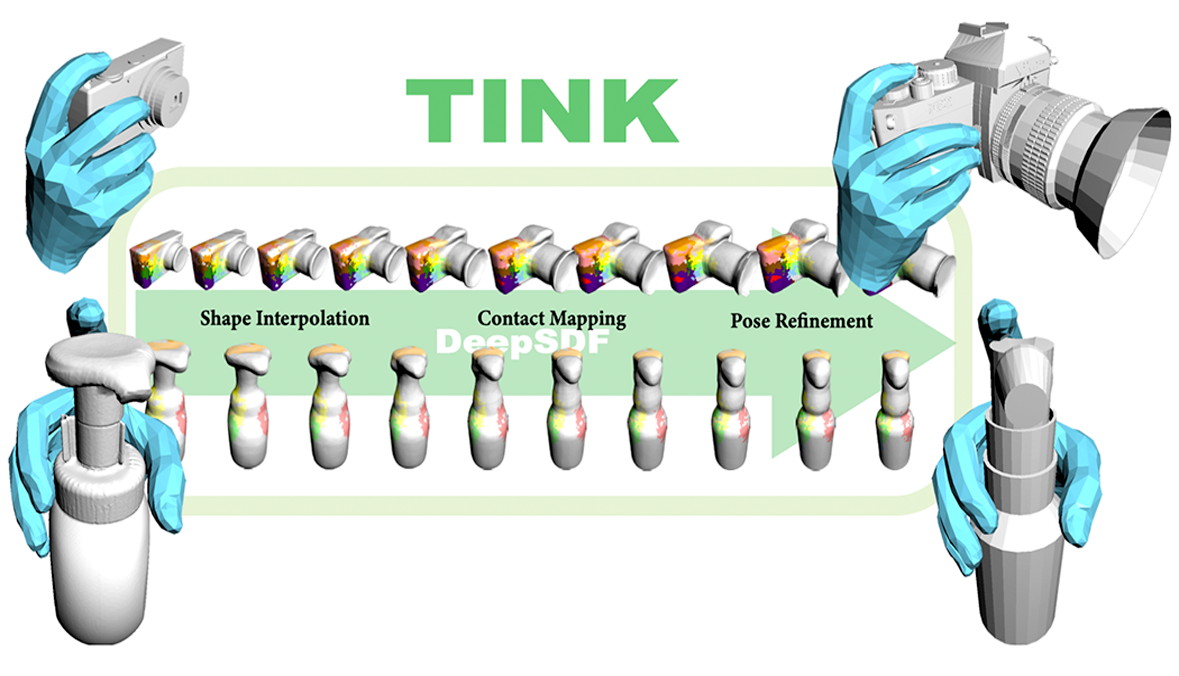
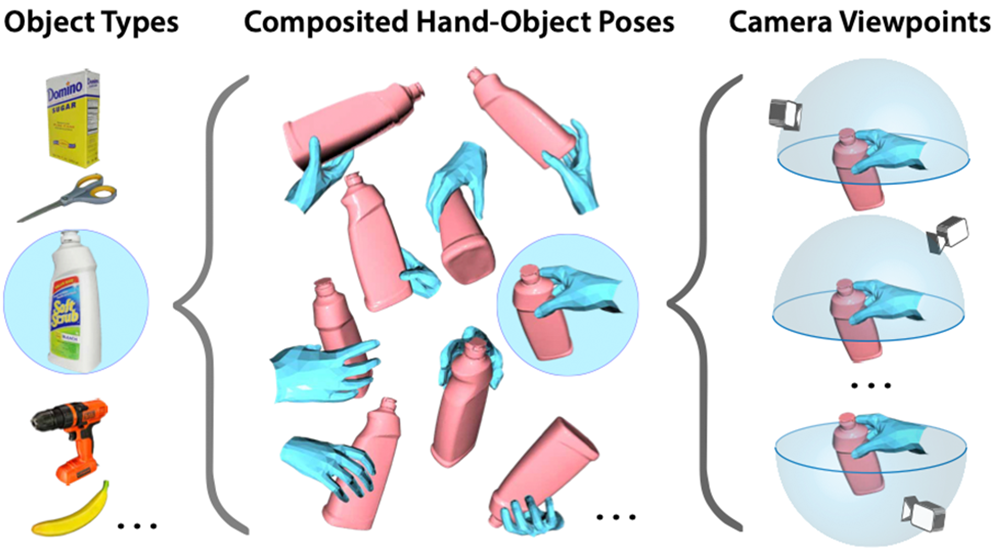
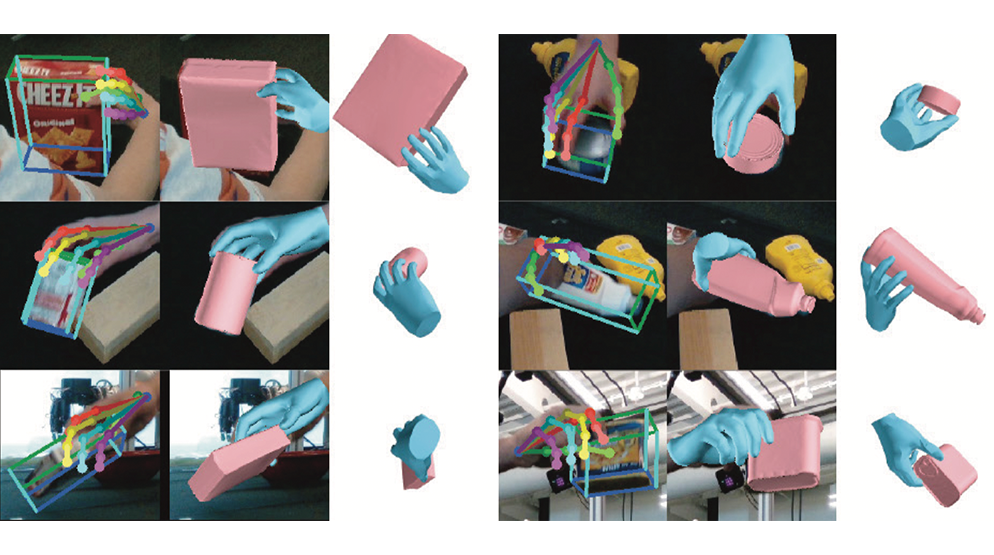
Currently, I am focusing on modeling and imitating the hand manipulating objects,
including 3D hand | object pose | shape estimation,
grasp | motion generation, imitation learning, dexterous manipulation.
Join Us. I am looking for Ph.D. and master's students at SJTU SAI, as well as
self-motivated research interns. Contact me if you are interested in the above topics.
诚招科研实习生(带薪),我们一起做有意思的科研。
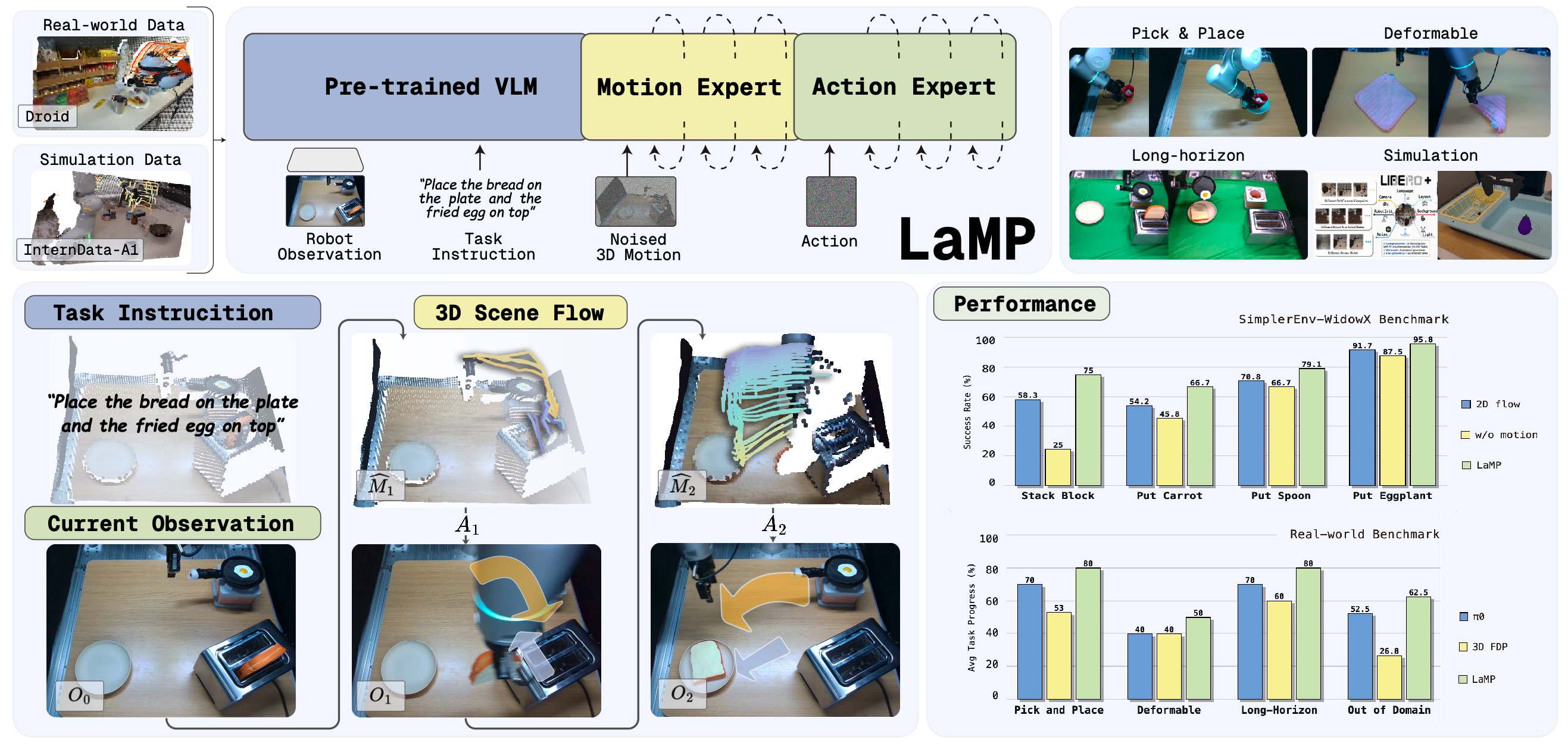
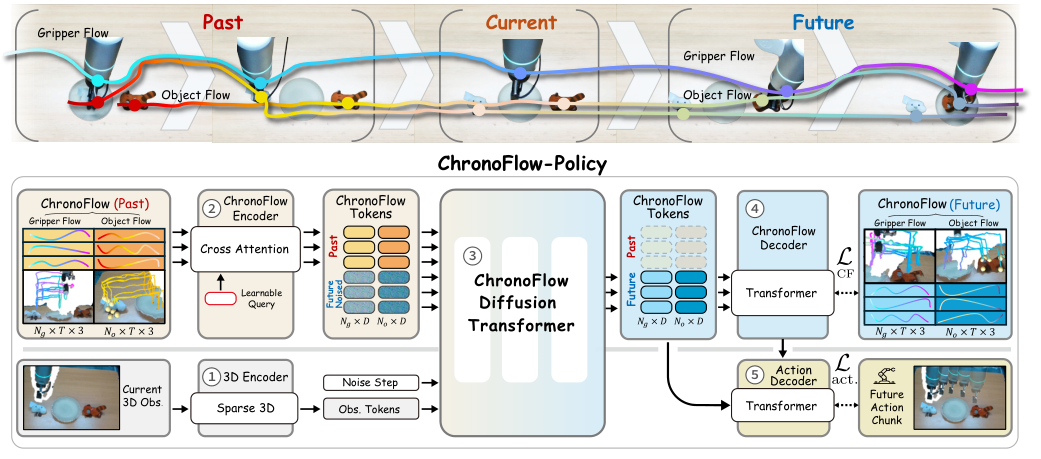
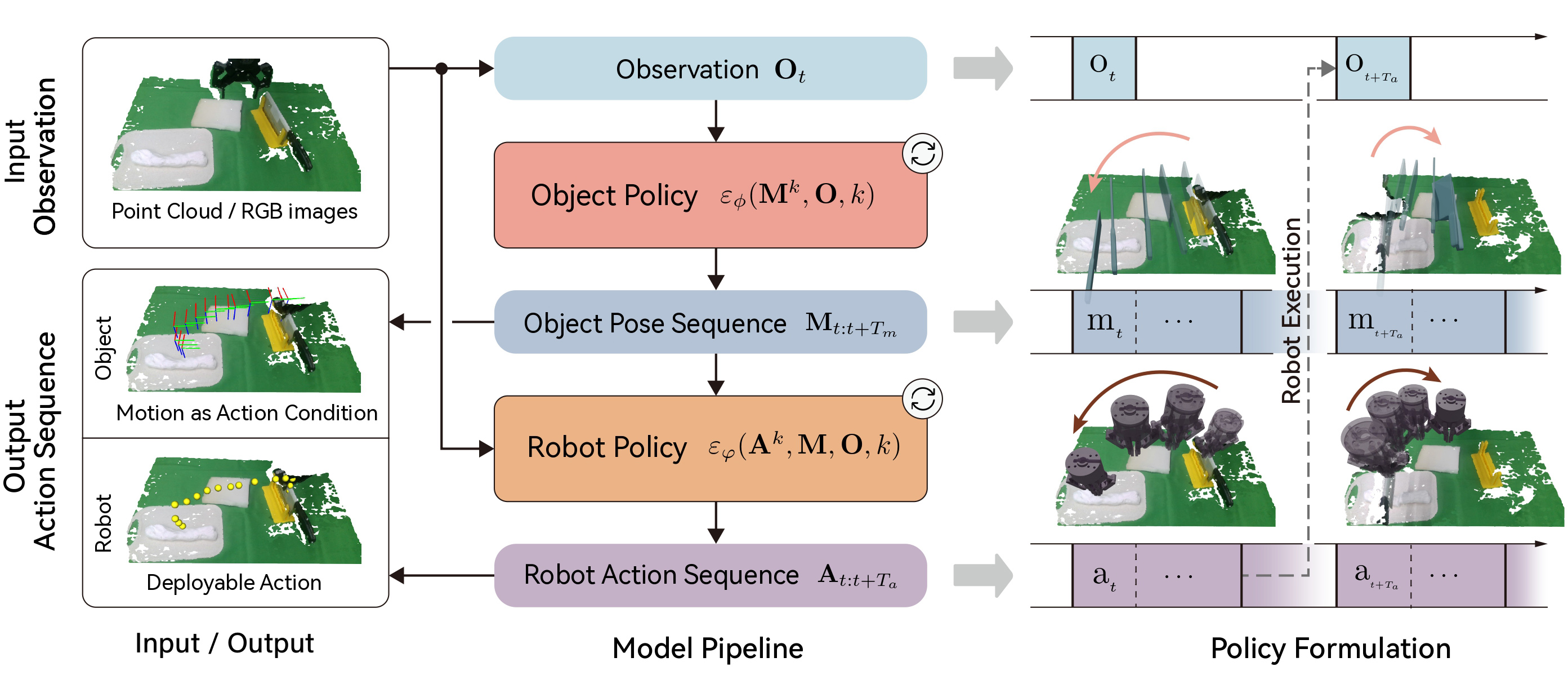
A diffusion-based visuomotor policy that co-trains action generation with unified past-current-future object-gripper keypoint flows for robust long-horizon manipulation.
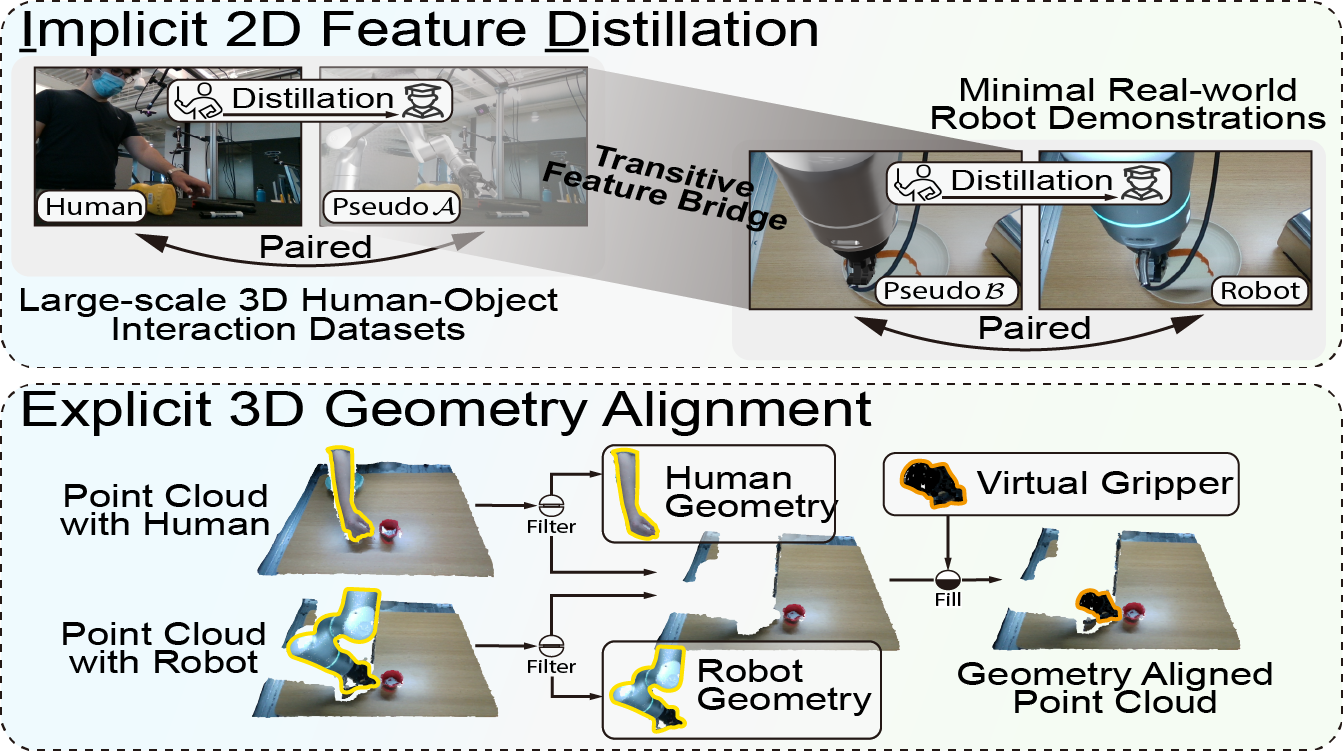
LIDEA: Human-to-Robot Imitation Learning via Implicit Feature Distillation and Explicit Geometry Alignment
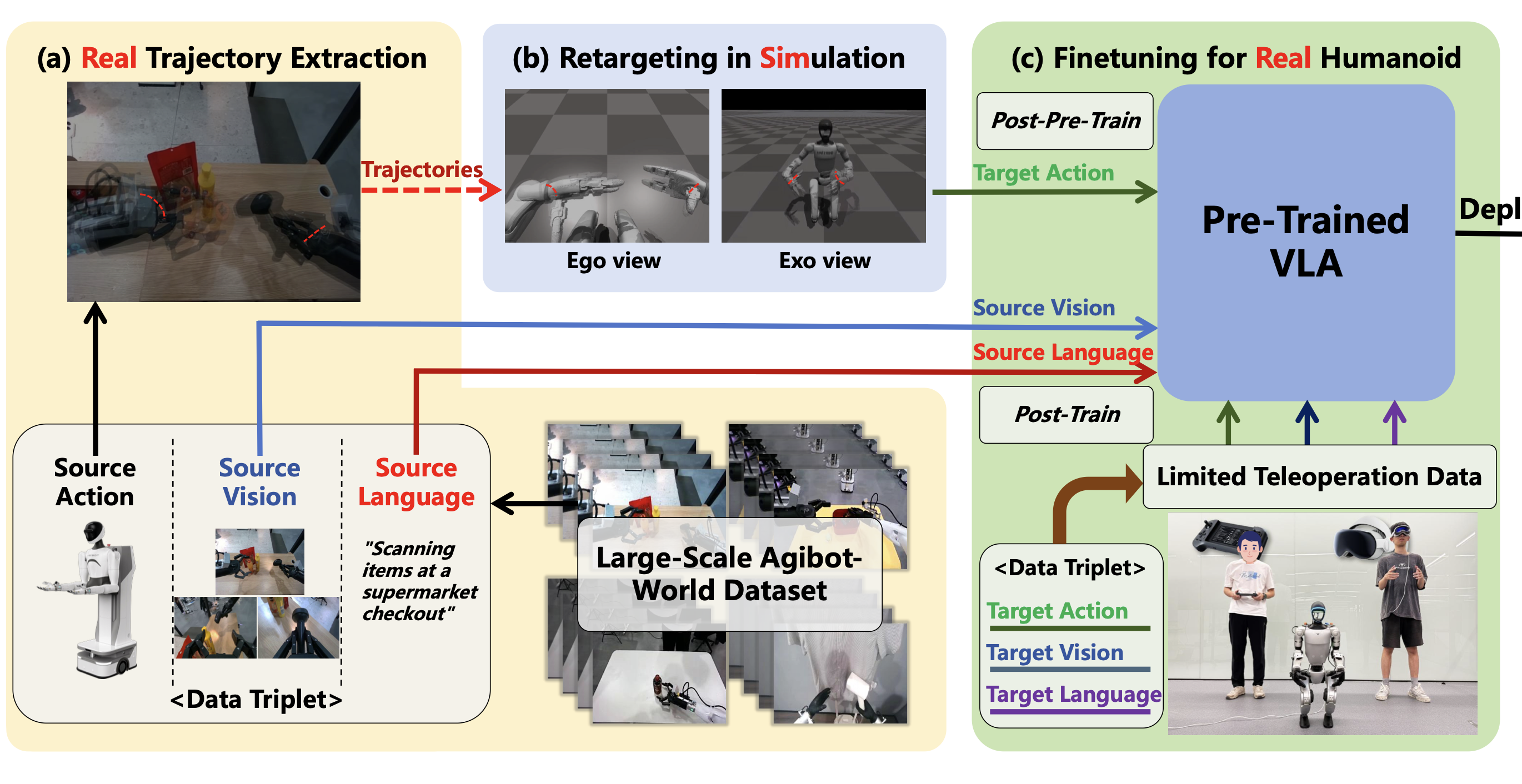
A cross-embodiment framework that transfers wheeled-humanoid data to bipedal VLA models via morphology-agnostic 6D end-effector trajectories and a heuristic-enhanced online DAgger controller.
Motion Before Action: Diffusing Object Motion as Manipulation Condition
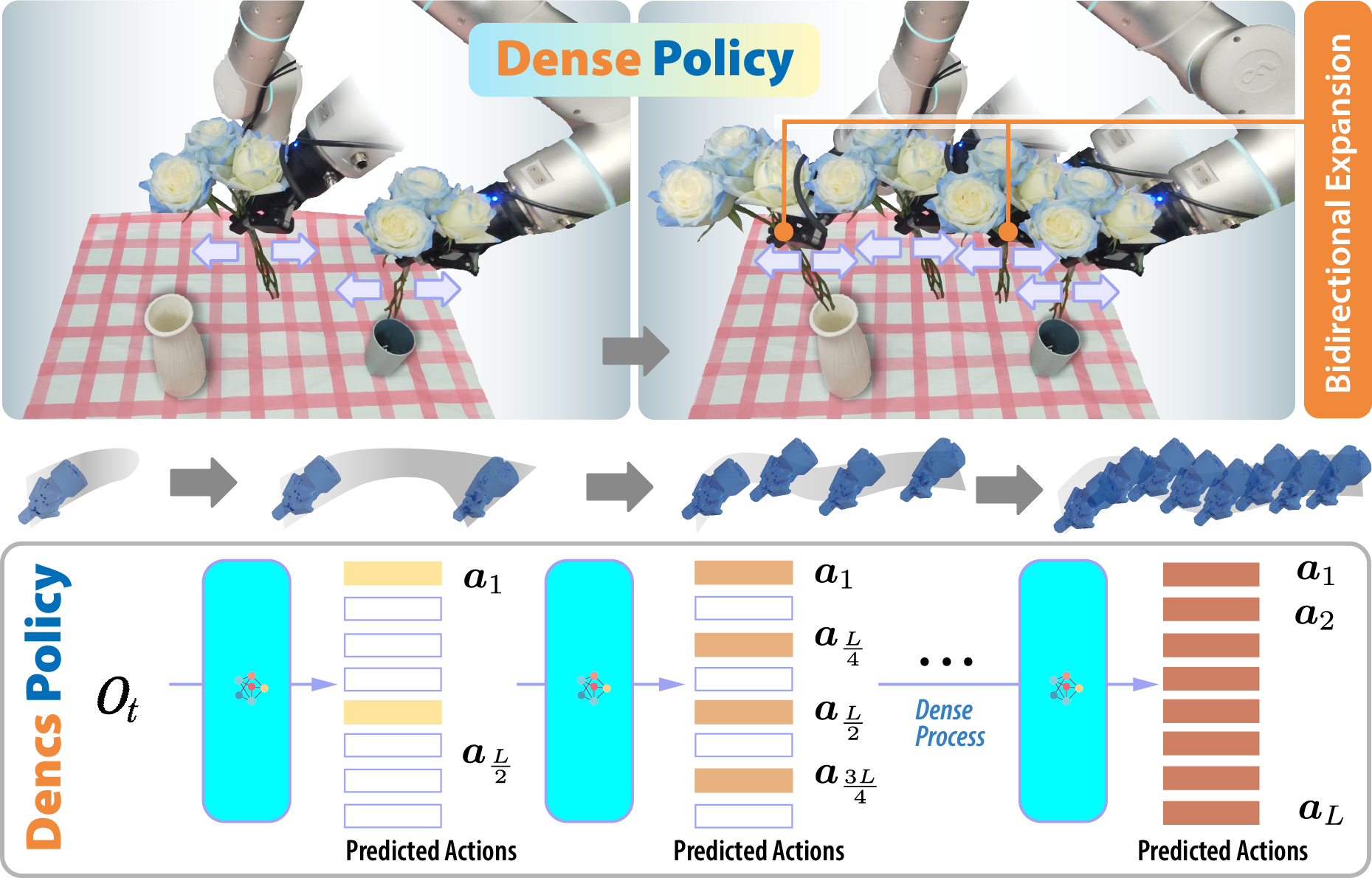
A bidirectional robotic autoregressive policy, which infers trajectories by gradually expanding actions from sparse keyframes, demonstrated exceeding diffusion policies.
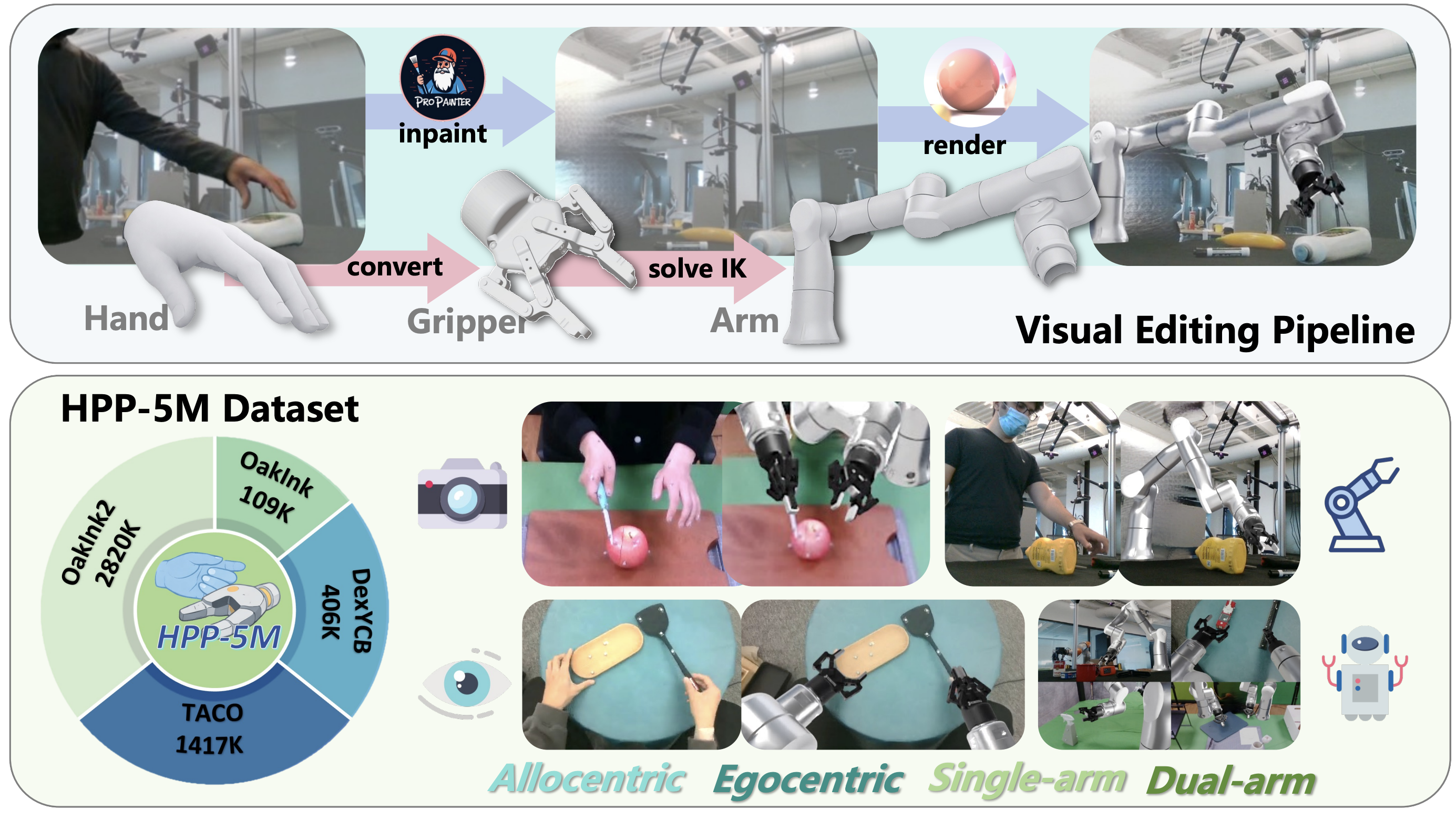
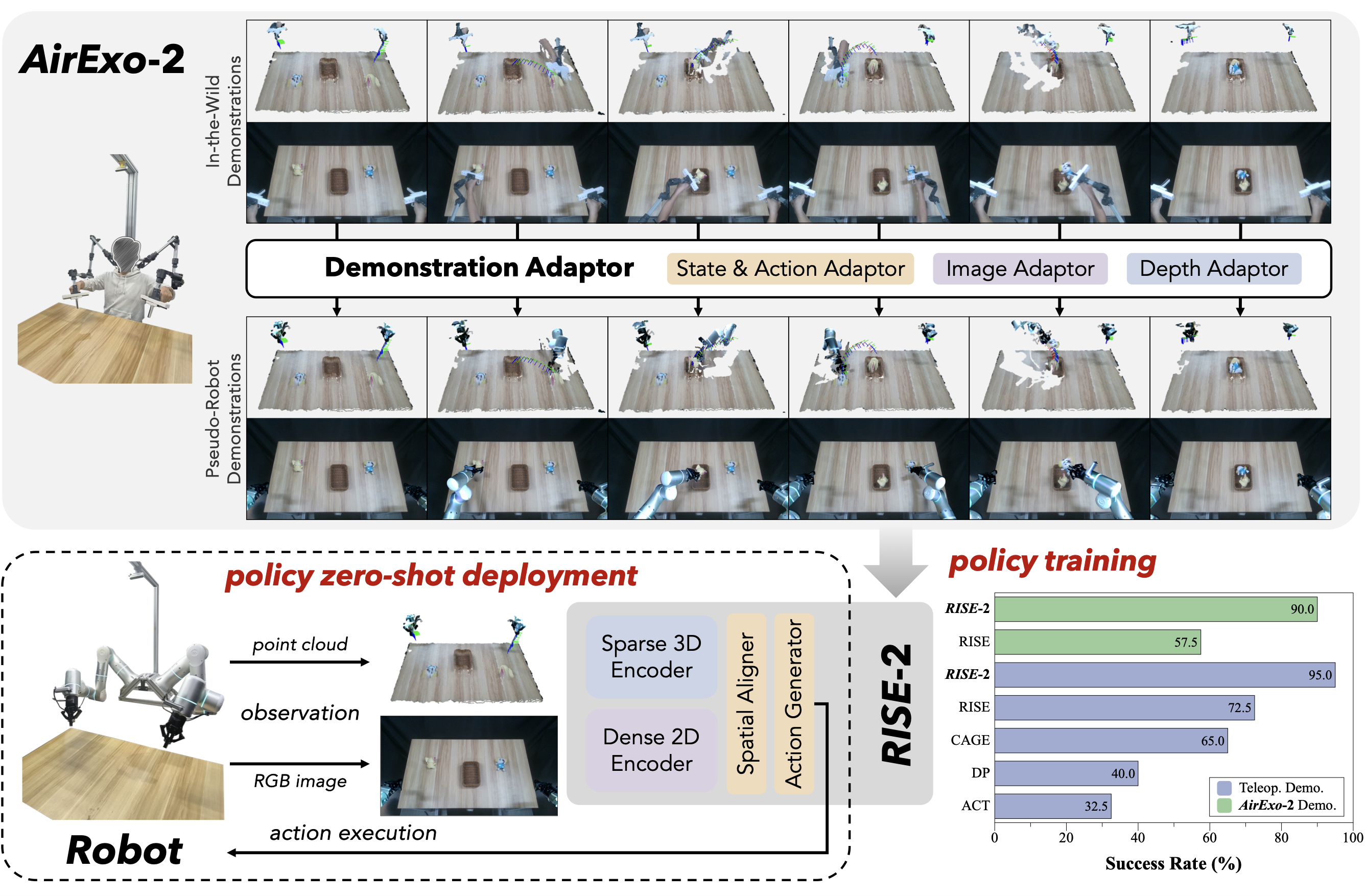
AirExo-2: Scaling up Generalizable Robotic Imitation Learning with Low-Cost Exoskeletons
A low-cost exoskeleton system that captures human in-the-wild manipulation and
directly converts the wearer's actions into scalable pseudo-robot demonstrations.
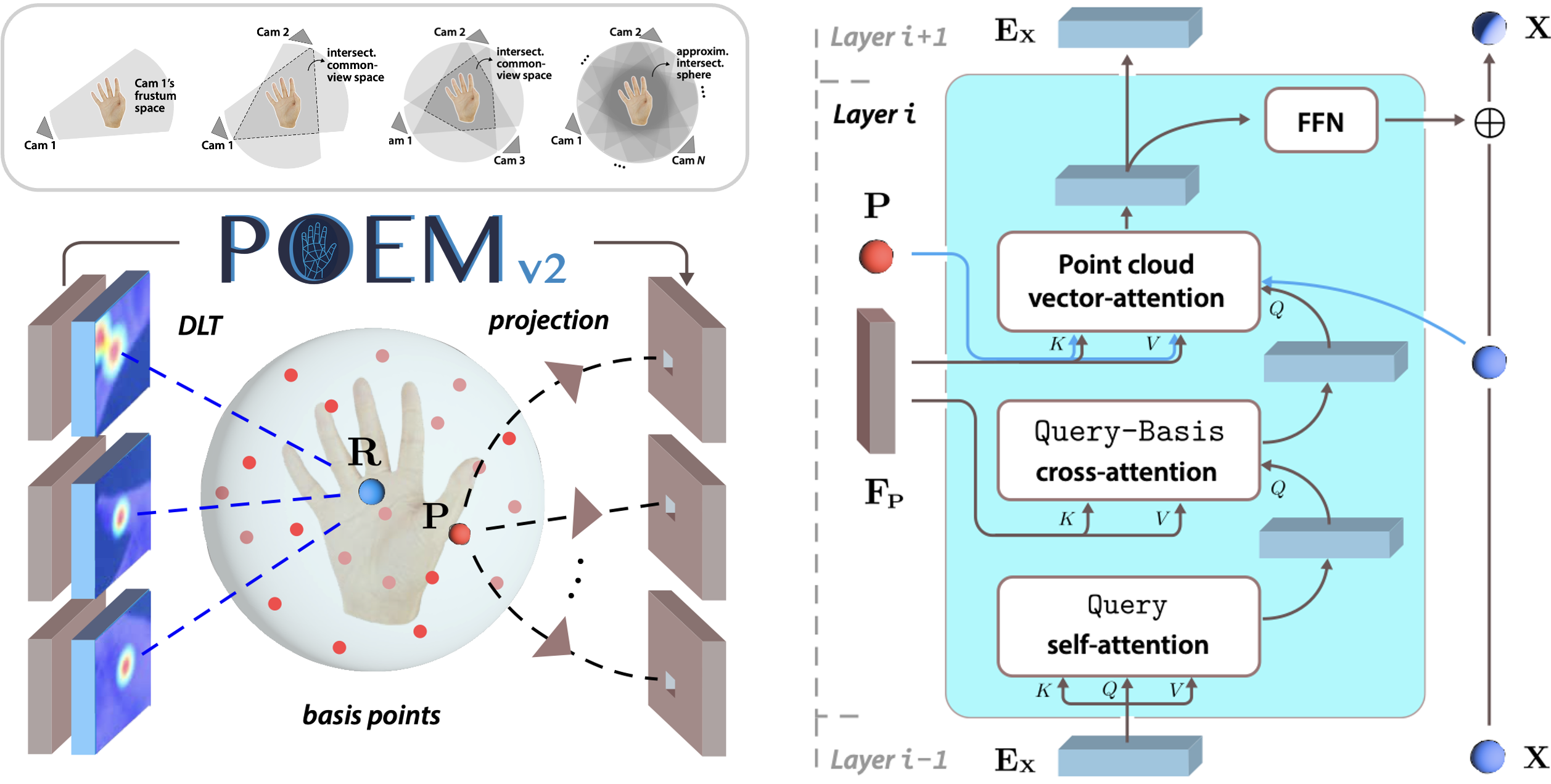
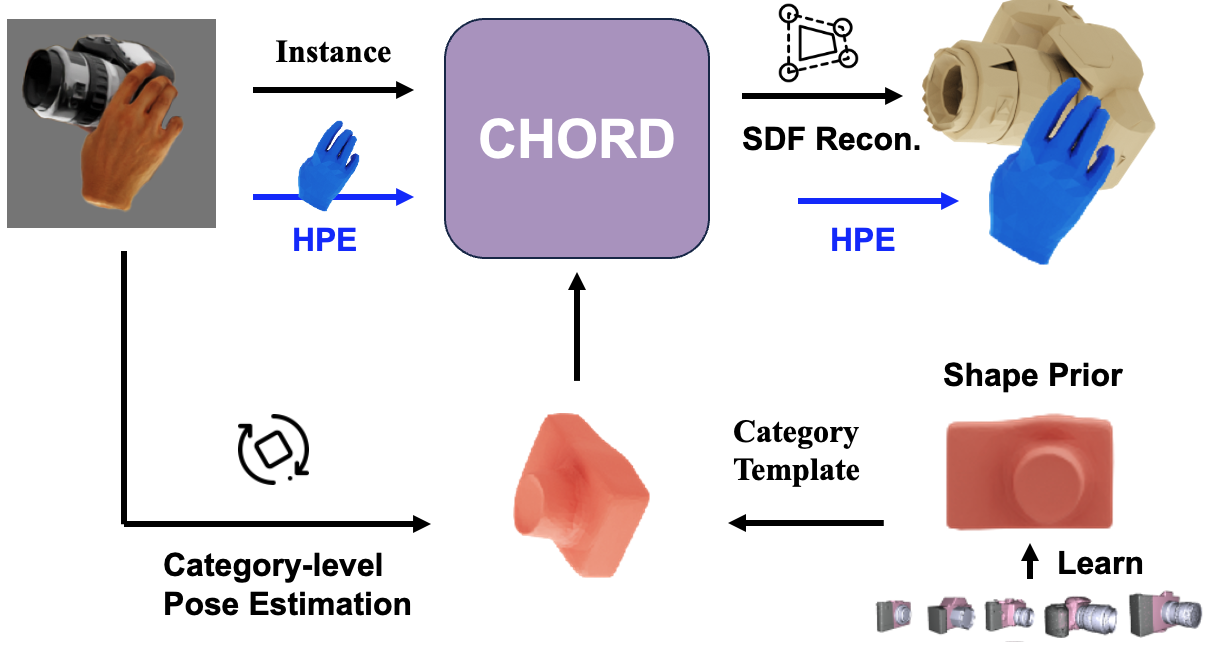
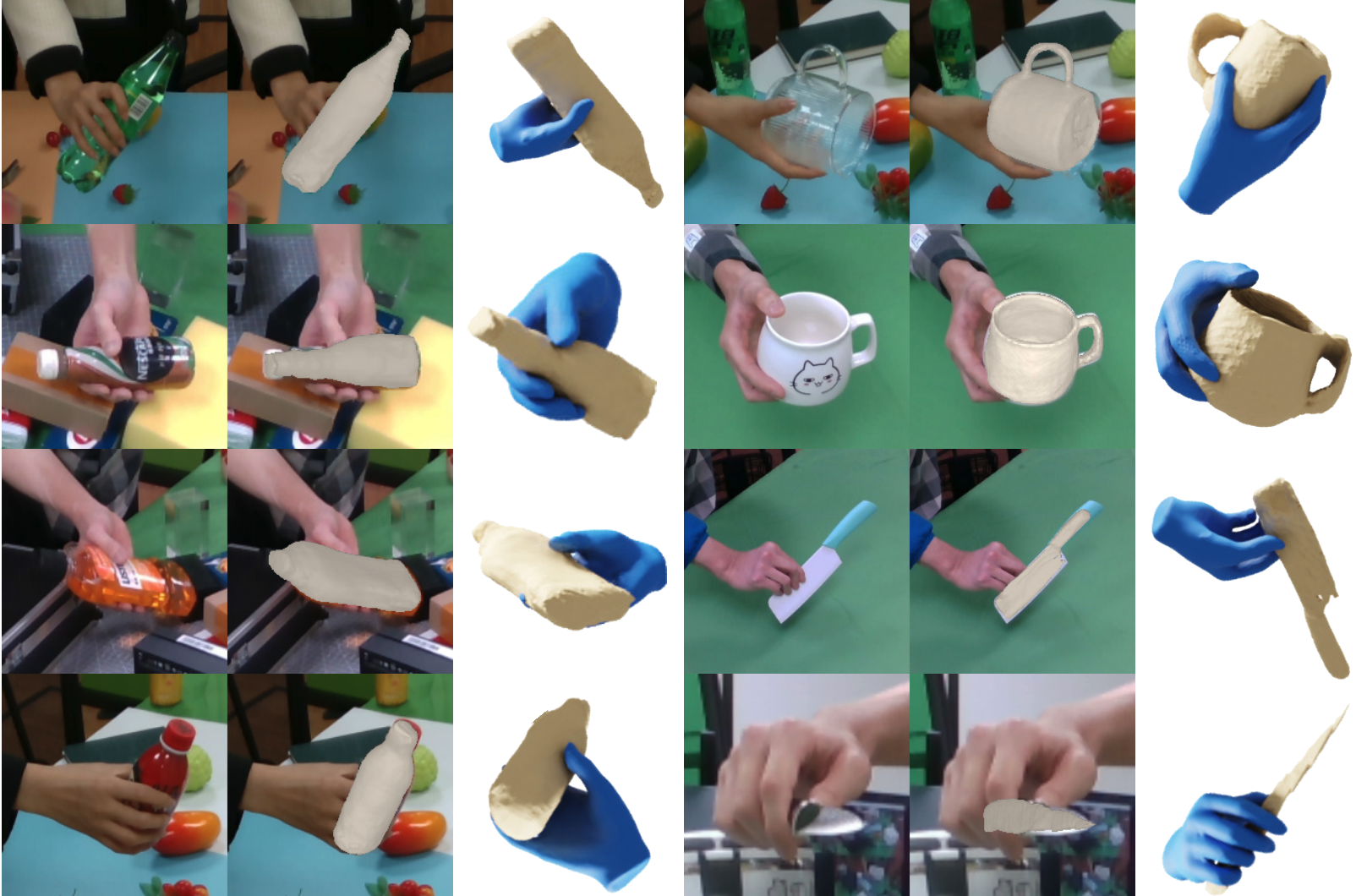
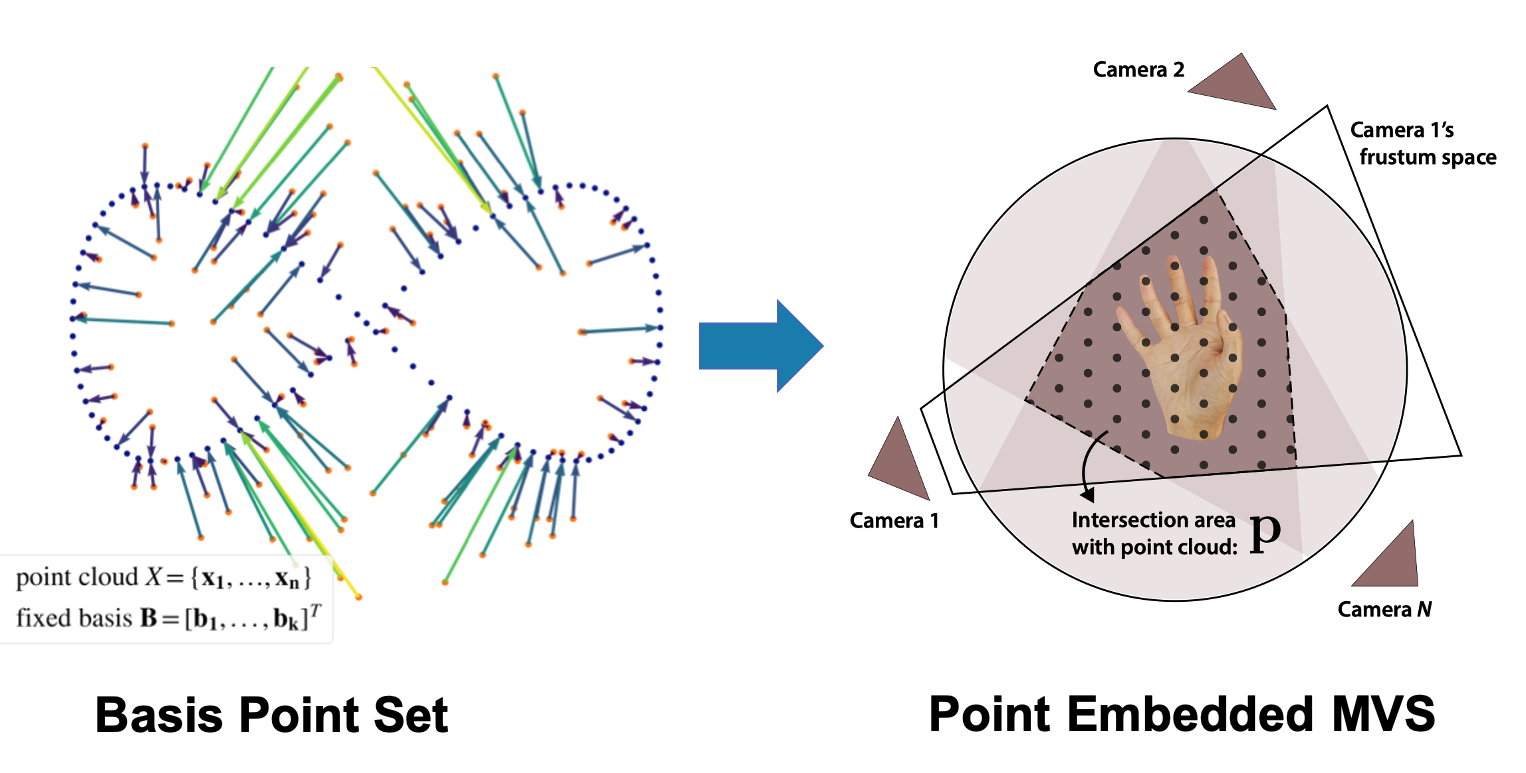
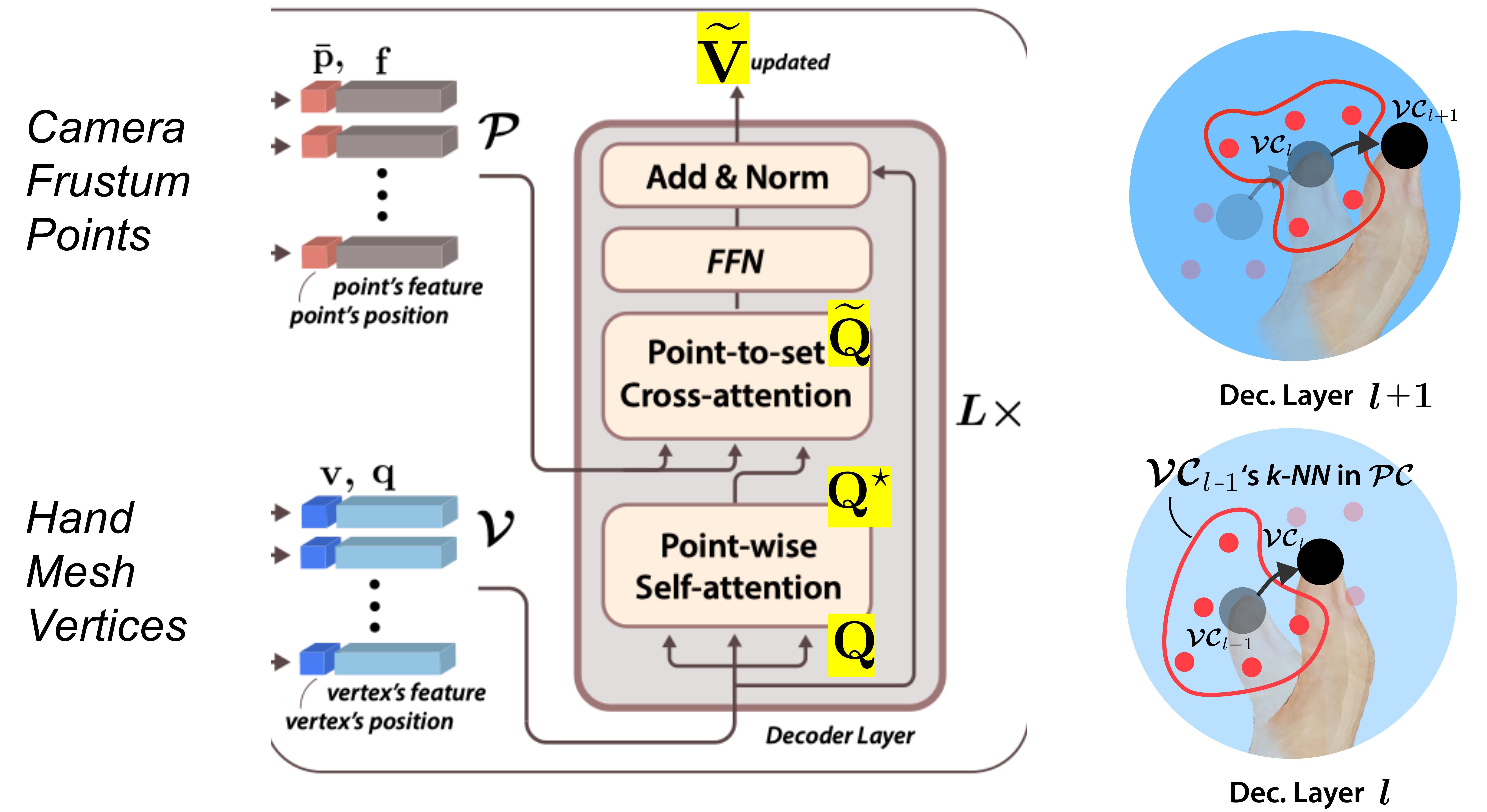
Multi-view Hand Reconstruction with a Point-Embedded Transformer
POEM-v2 a generalizable multi-view 3D hand reconstruction model trained on large-scale multi-view datasets. It enables accurate, flexible, and occlusion-robust hand mesh recovery across arbitrary multi-view setups.
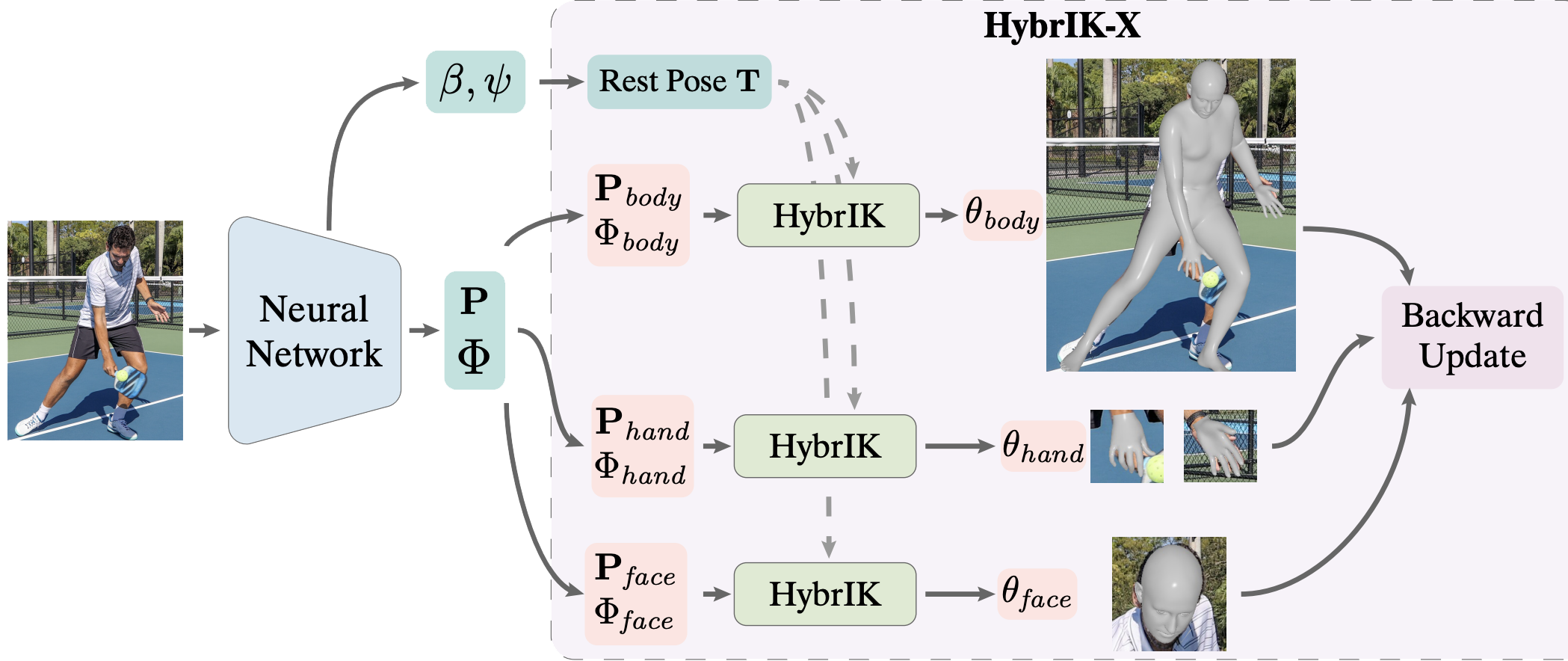
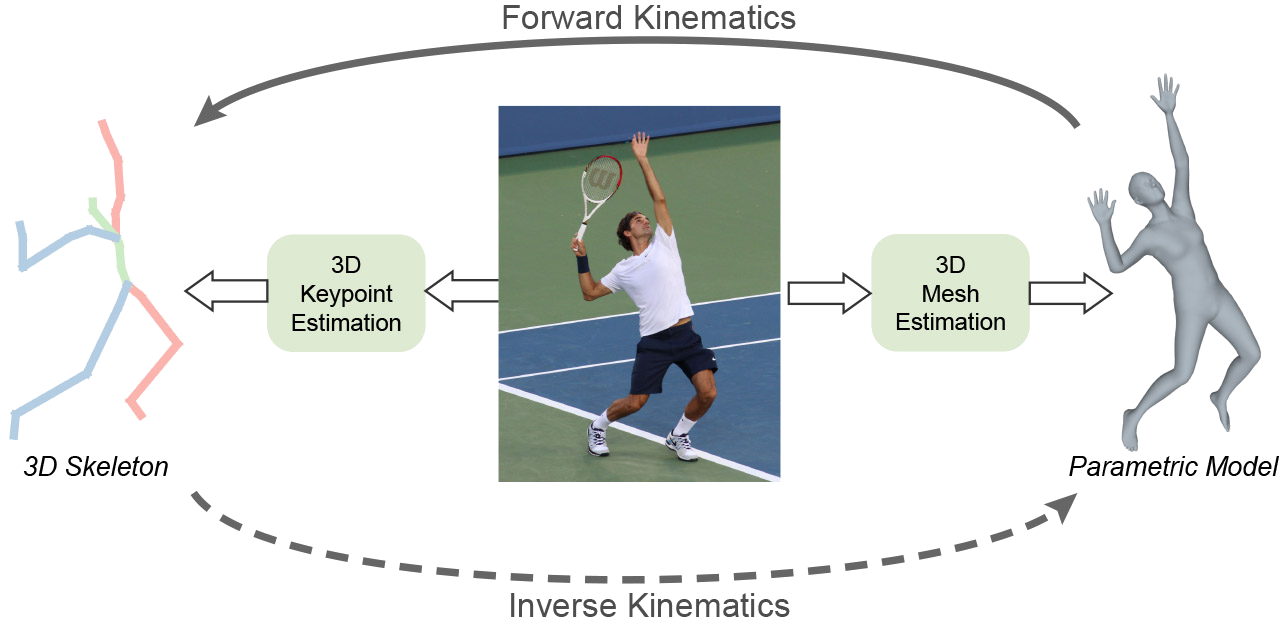
HybrIK-X: Hybrid Analytical-Neural Inverse Kinematics for Whole-body Mesh Recovery
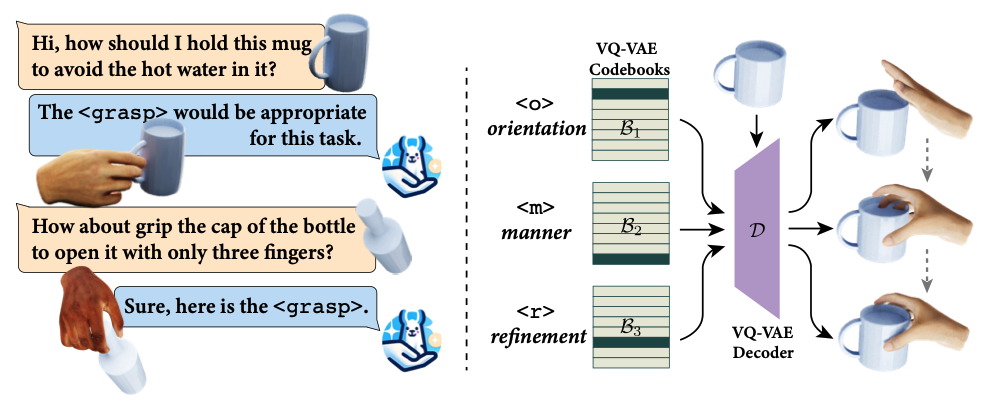
A MLLM-based method that infuses language instructions into grasp generation; & A new
language-pose
dataset, CapGrasp,
featuring detailed caption of grasping poses.
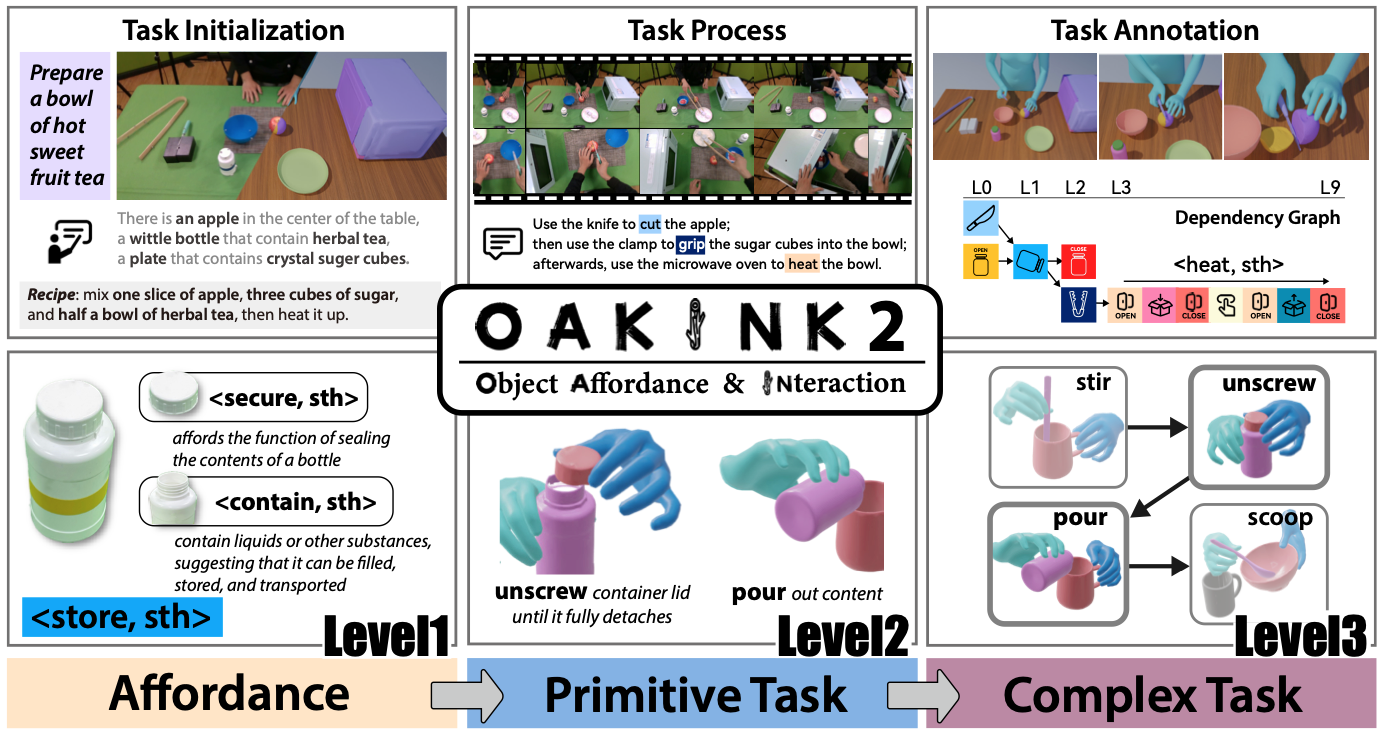
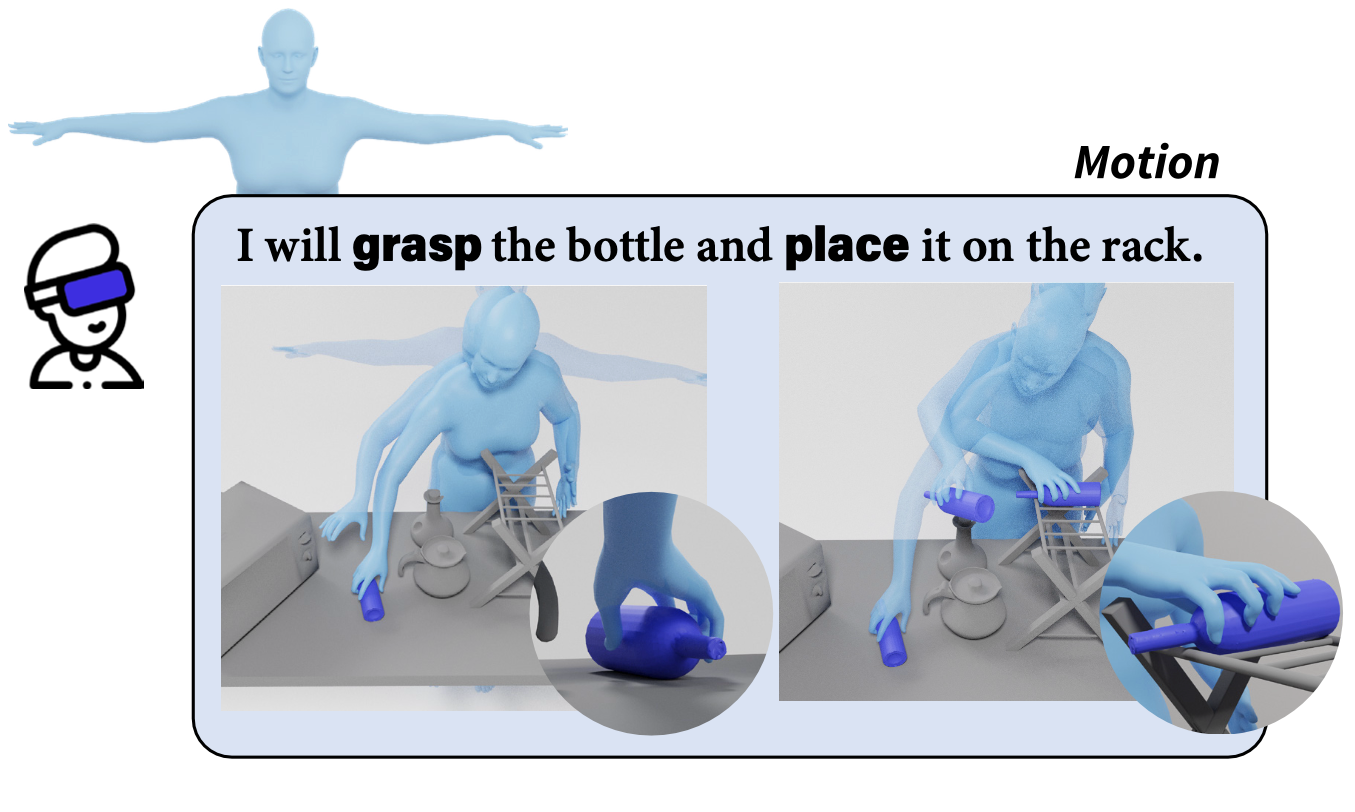
OakInk2: A Dataset of Bimanual Hands-Object Manipulation in Complex Task Completion
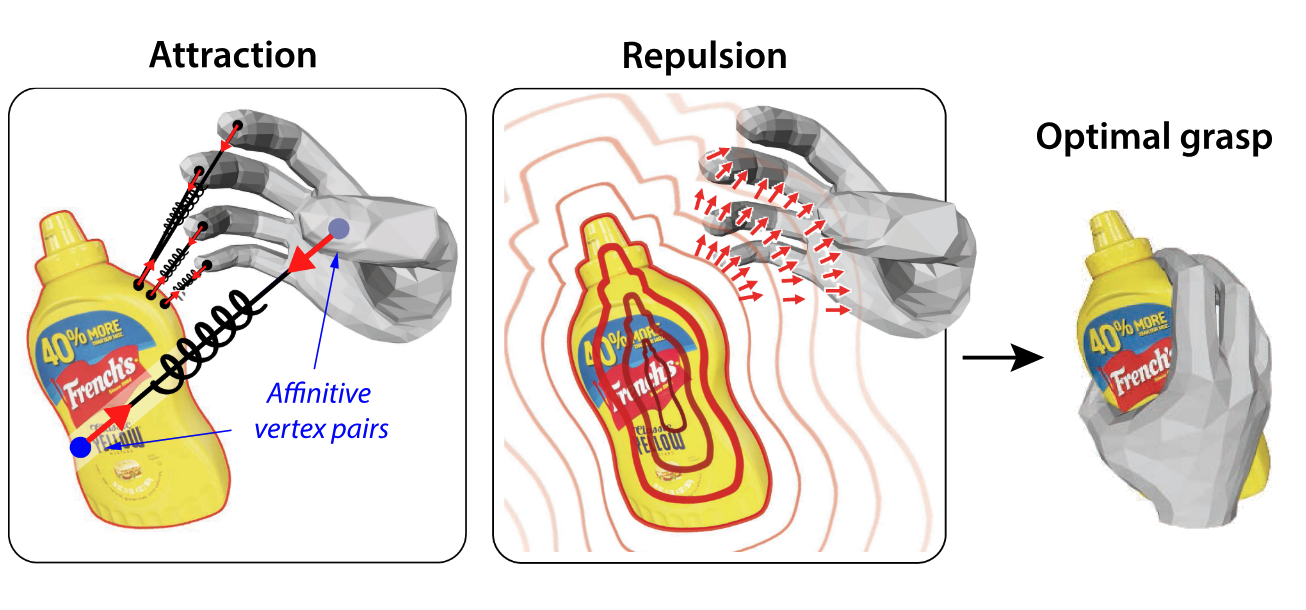
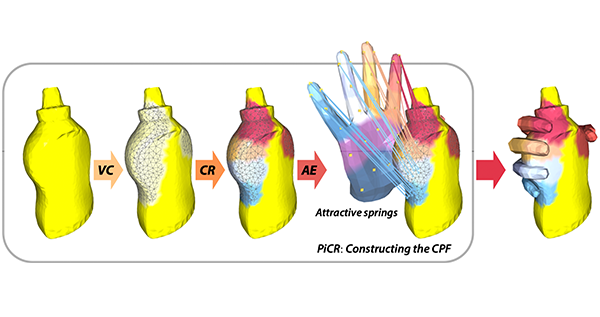
Extends CPF into a unified spring-mass-style contact field that couples attraction, repulsion, and geometry constraints for robust hand-object reconstruction.
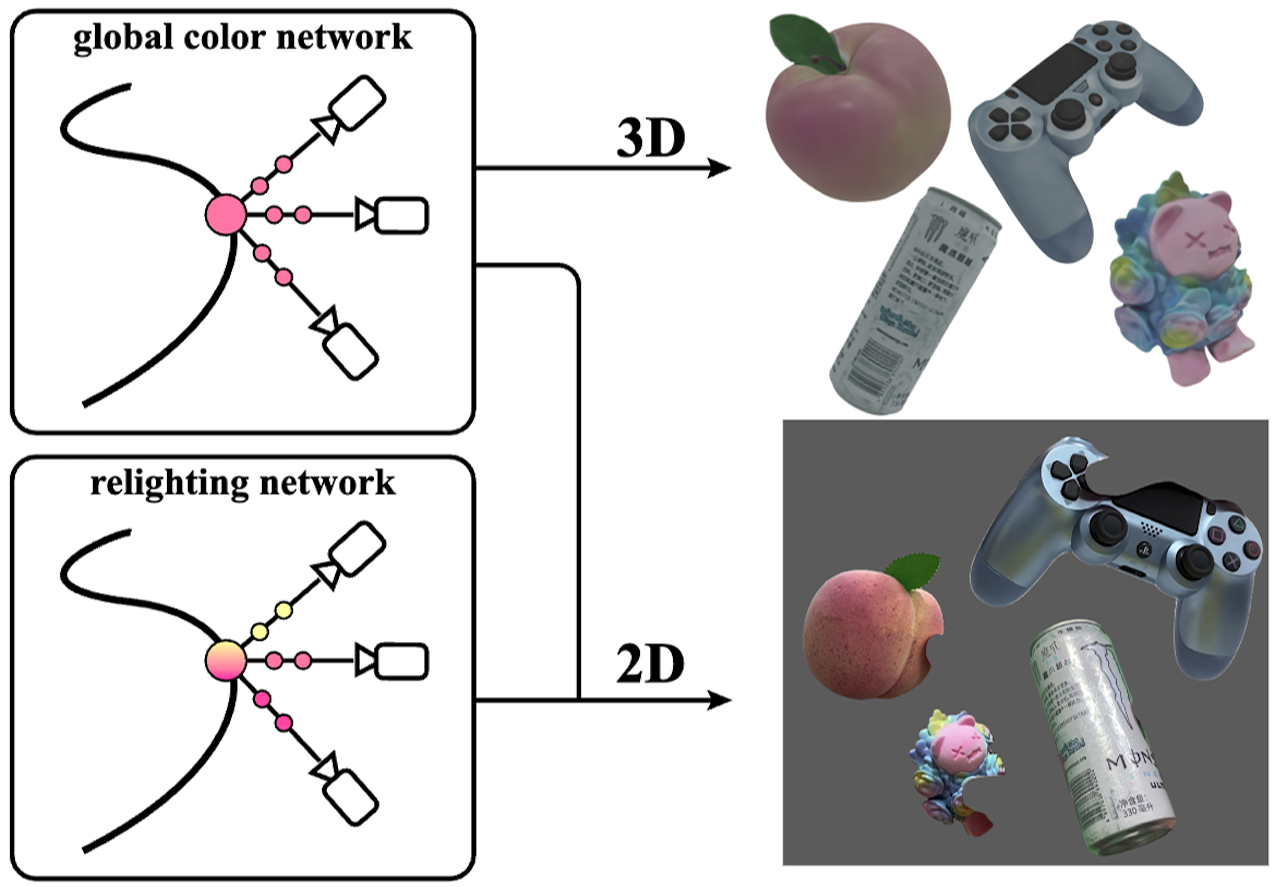
Color-NeuS: Reconstructing Neural Implicit Surfaces with Color