|
Lixin YANG (杨理欣)
Research Assistant Professor
Shanghai Jiao Tong University, School of Artificial Intelligence
上海交通大学人工智能学院 助理研究员, 硕士生导师
Member of Machine Vision and Intelligence Group (MVIG) at SJTU
Email: siriusyang at sjtu dot edu dot cn
Office: Bldg. SAI, No. 1954 Huashan Rd., Xuhui Dist., Shanghai, 200230, China
Bio. I’m a Research Assistant Professor in Shanghai Jiao Tong University (SJTU),
affiliated with the School of Artificial Intelligence
(SAI),
where I joined in September 2024.
I obtained Ph.D. degree in Computer Science from SJTU in 2023, advised by Prof. Cewu
Lu at the Machine Vision and Intelligence Group and
M.S. degree in Mechanical Engineering, SJTU.
My research interests include 3D Vision and
Robotics.
Currently, I am focusing on modeling and imitating the hand manipulating objects,
including 3D hand | object pose | shape estimation,
grasp | motion generation, imitation learning, dexterous manipulation.
Join Us. I am looking for Master Student at SJTU SAI and self-motivated research
interns. Contact me if you are interested
in
the above topics.
诚意招收研究实习生(带薪), 我们一起做有意思的科研。
Email /
Google
Scholar /
GitHub /
Twitter
|

|
[2026.01]
Two papers have been accepted to ICRA 2026 🇦🇹
[2025.07]
Generalizable Multi-view Hand Reconstruction POEMv2 is accepted by
TPAMI 2025
[2025.06]
Dense Policy is accepted by
ICCV 2025 🇺🇸
[2025.05]
Motion-before-Action is accepted by
RA-L.
[2025.01]
HybrIK-X is accepted by
TPAMI.
[2024.12]
Invited Talk at ROSCon China
Workshop, thanks Yao Mu for hosting.
[2024.09]
One paper on articulated object image manipulation got accepted by NeurIPS 2024 🇨🇦.
[2024.07]
One paper: SemGrasp is accepted by ECCV 2024 🇮🇹.
[2024.02]
One paper: OakInk2 is accepted by CVPR 2024 🇺🇸.
[2024.02]
The Contact Potential Field is accepted by TPAMI.
[2023.12]
One paper: FAVOR is accepted by AAAI 2024 🇨🇦.
[2023.10]
One paper: Color-NeuS is
accepted by 3DV 2024 🇨🇭.
[2023.08]
I defend my doctoral thesis and earn my Ph.D!
[2023.08]
I am honored to be an invited speaker at the HANDS
workshop at ICCV 2023.
[2023.07]
One paper: CHORD is accepted by ICCV 2023 🇫🇷.
[2023.06]
Invited Talk at 智东西公开课 | 研讨会: 3D手部重建及具身智能交互. 视频
(中文).
[2023.02]
One paper: POEM is accepted by
CVPR 2023.
[2022.10]
I have taken the wonderful journey of marriage alongside my cherished
wife.
[2022.10]
Invited Talk at International Digital Economy
Academy (IDEA), Thanks Ailing Zeng for hosting.
[2022.09]
One paper: DART got accepted by
NeurIPS
2022 - Datasets and Benchmarks Track.
[2022.07]
Invited Talk at 智东西公开课 | AI新青年讲座: 基于图像的手物交互重建与虚拟人手生成. 视频
(中文).
[2022.04]
Invited Talk at MPI-IS Perceiving Systems.
Thanks Yuliang Xiu for hosting.
(info).
[2022.03]
Two paper were accepted by CVPR 2022:
one Oral, one poster.
[2021.07]
One paper got accepted by ICCV 2021.
|
Publications
*=equal contribution, #=corresponding author
|
|
|
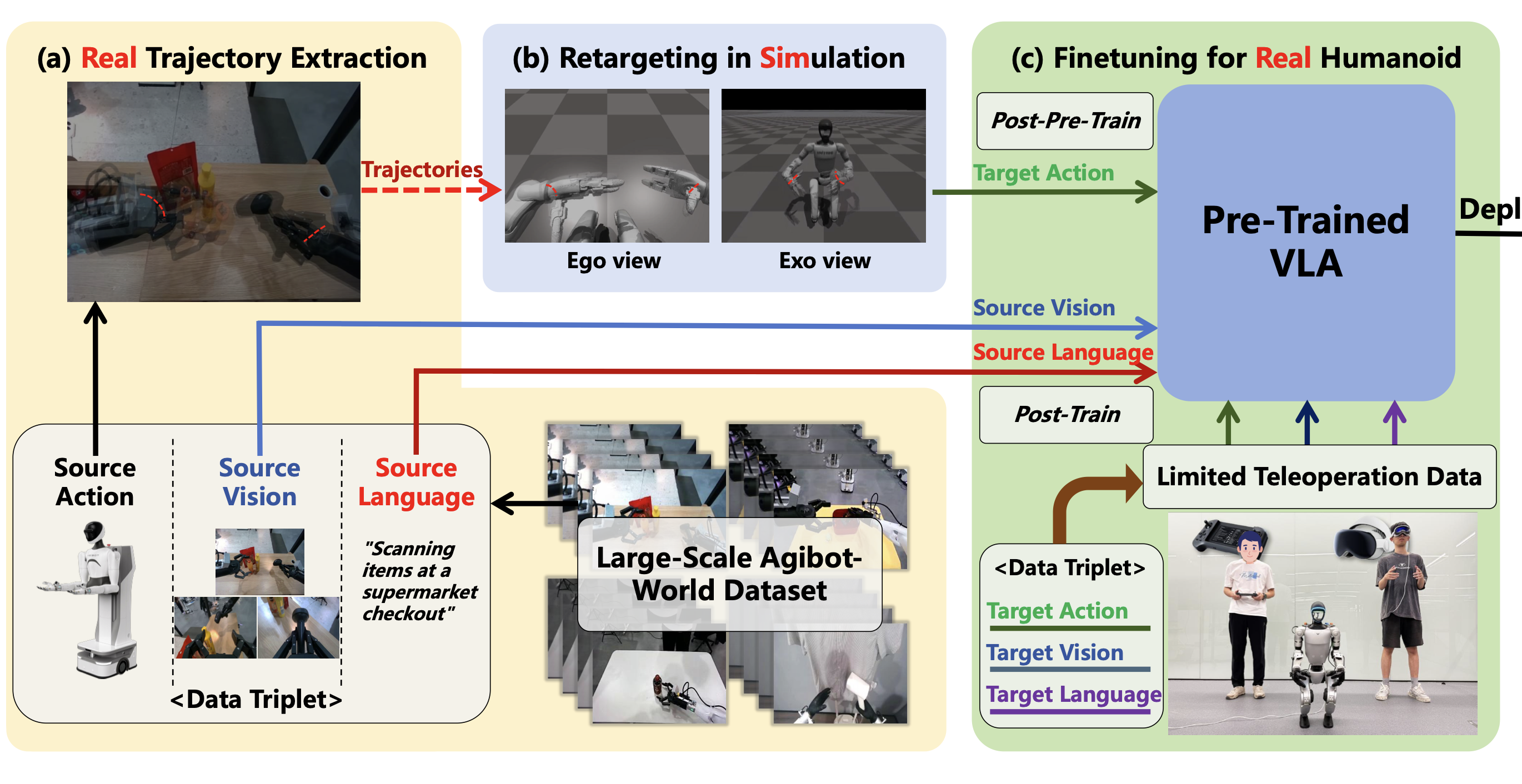
TrajBooster: Boosting Humanoid Whole-Body Manipulation via Trajectory-Centric Learning
Jiacheng Liu*,
Pengxiang Ding*,
Qihang Zhou,
Yuxuan Wu,
Da Huang,
Zimian Peng,
Wei Xiao,
Weinan Zhang,
Lixin Yang#,
Cewu Lu#,
Donglin Wang#,
ICRA, 2026
project
/
arXiv
A cross-embodiment framework that transfers wheeled-humanoid data to bipedal VLA models via morphology-agnostic 6D end-effector trajectories and a heuristic-enhanced online DAgger controller.
|
|
|
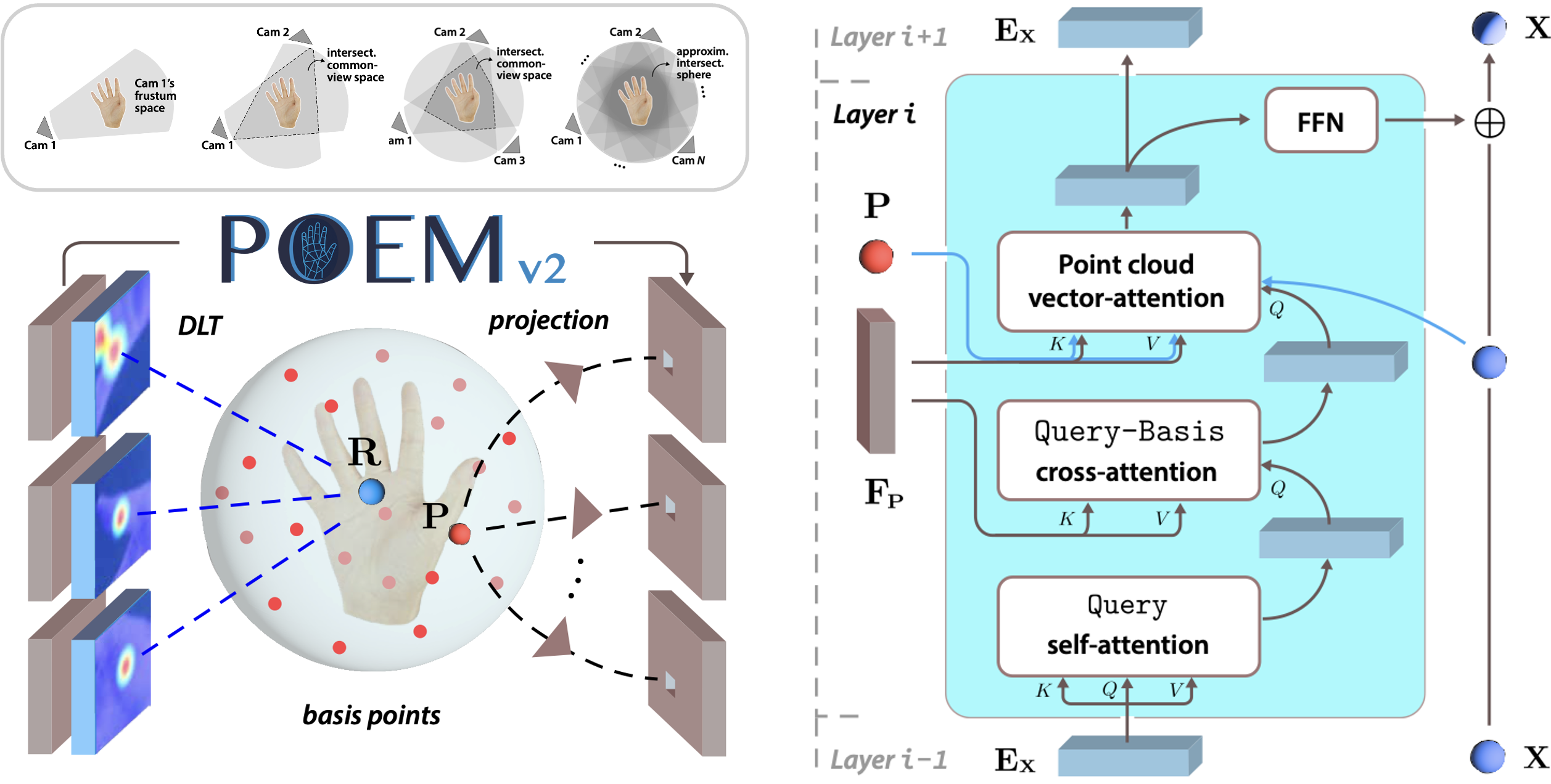
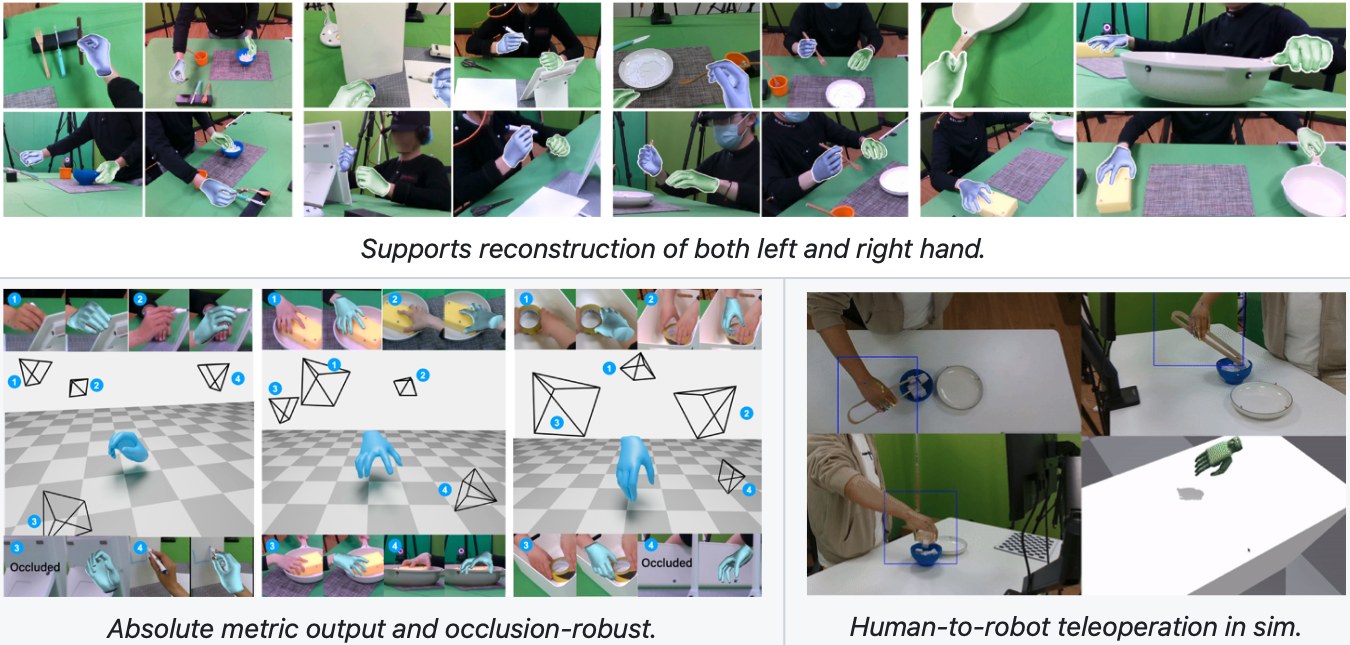
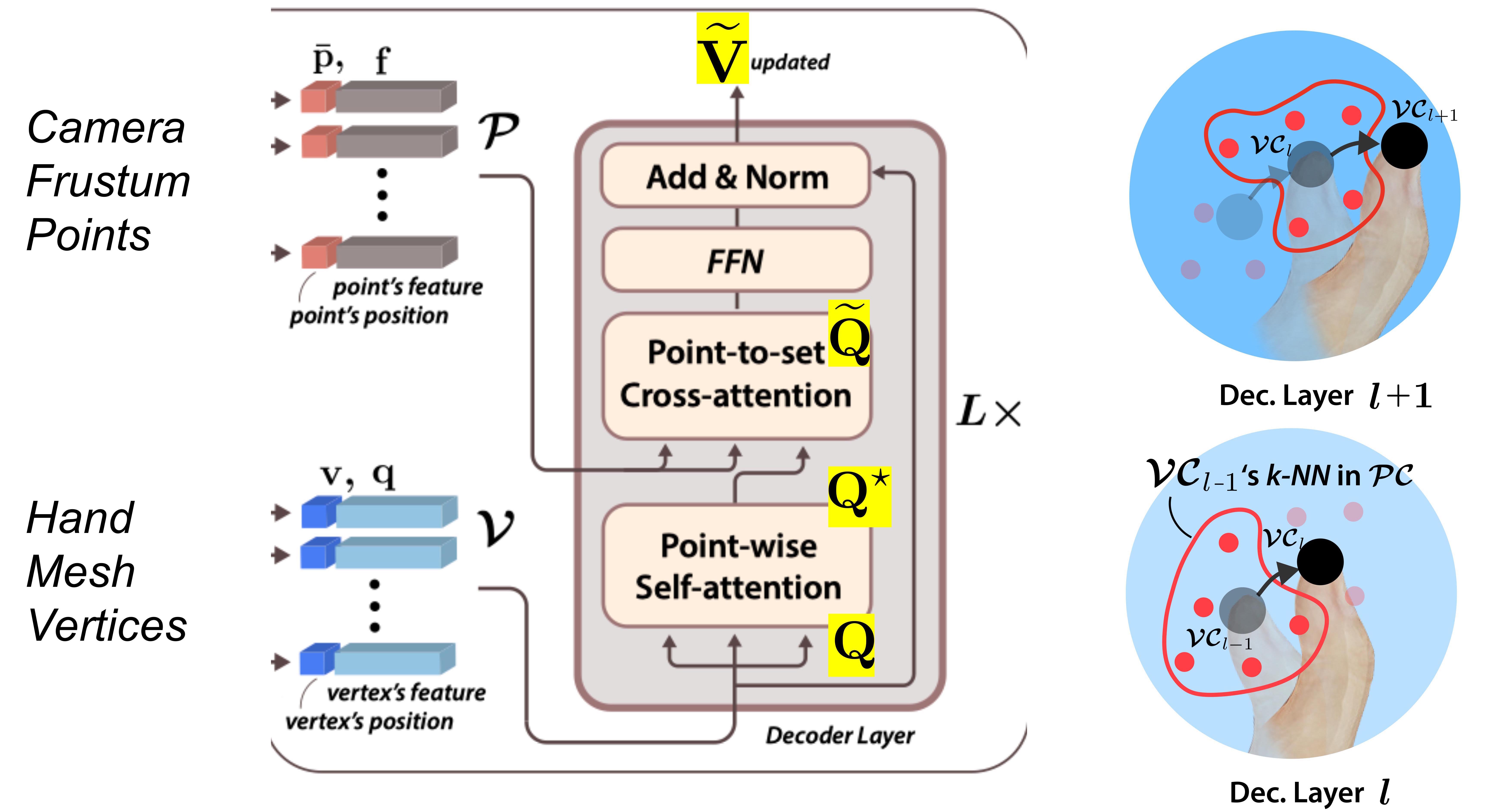
Multi-view Hand Reconstruction with a Point-Embedded Transformer
TPAMI, 2025
paper
/
arXiv
/
code
POEM-v2: a generalizable multi-view 3D hand reconstruction model trained on large-scale multi-view datasets. It enables accurate, flexible, and occlusion-robust hand mesh recovery across arbitrary multi-view setups.
|
|
|
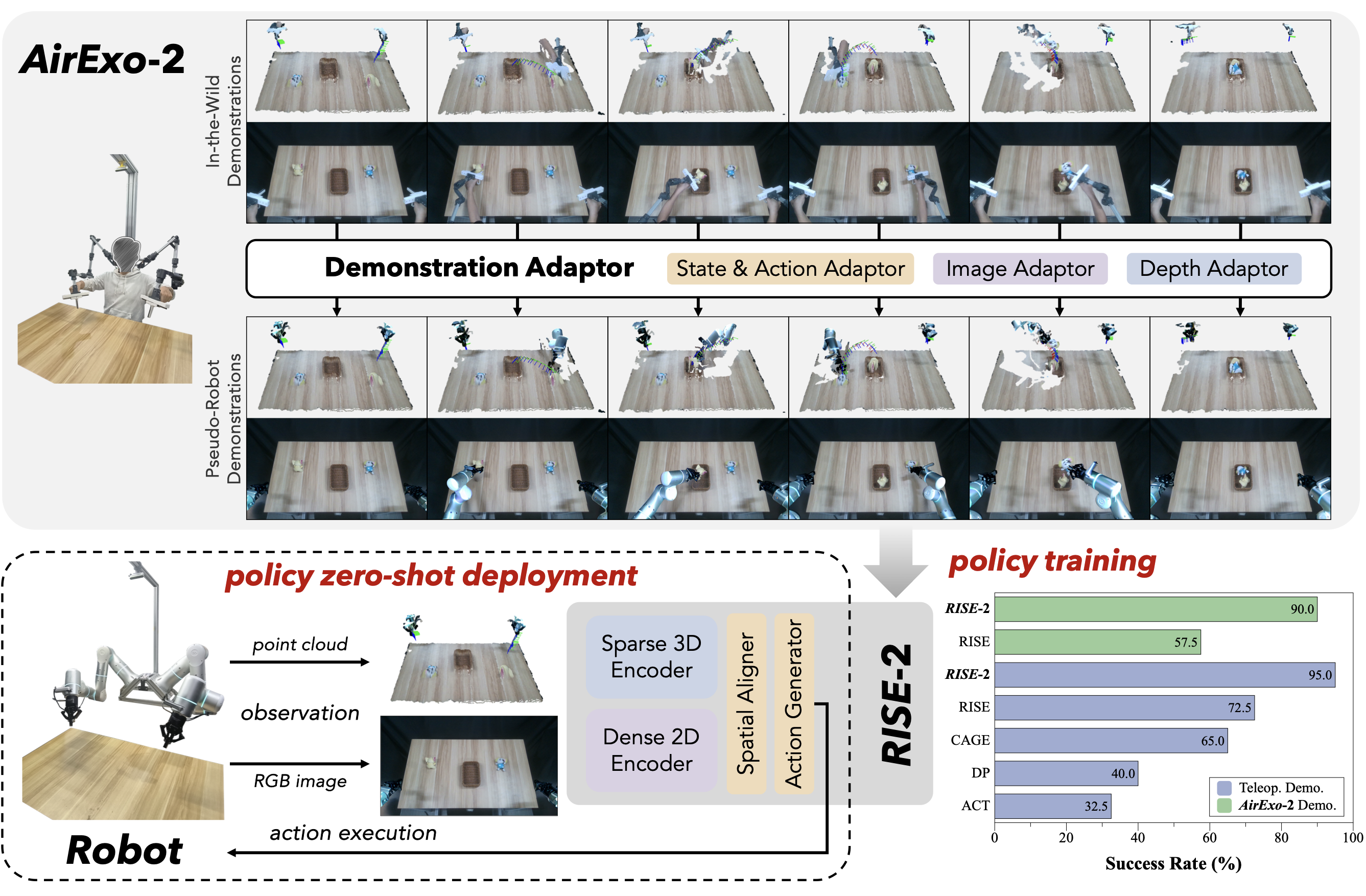
AirExo-2: Scaling up Generalizable Robotic Imitation Learning with Low-Cost Exoskeletons
Hongjie Fang*,
Chenxi Wang*,
Yiming Wang*,
Jingjing Chen*,
Shangning Xia,
Jun Lv,
Zihao He,
Xiyan Yi,
Yunhan Guo,
Xinyu Zhan,
Lixin Yang,
Weiming Wang,
Cewu Lu#,
Hao-Shu Fang#
CoRL, 2025 (Oral Presentation)
project
/
arXiv
AirExo-2, a low-cost exoskeleton system for large-scale in-the-wild demonstration
collection.
It transforms the collected in-the-wild demonstrations into pseudo-robot demonstrations.
RISE-2,
a generalizable imitation policy that integrates 2D and 3D perceptions.
|
|
|
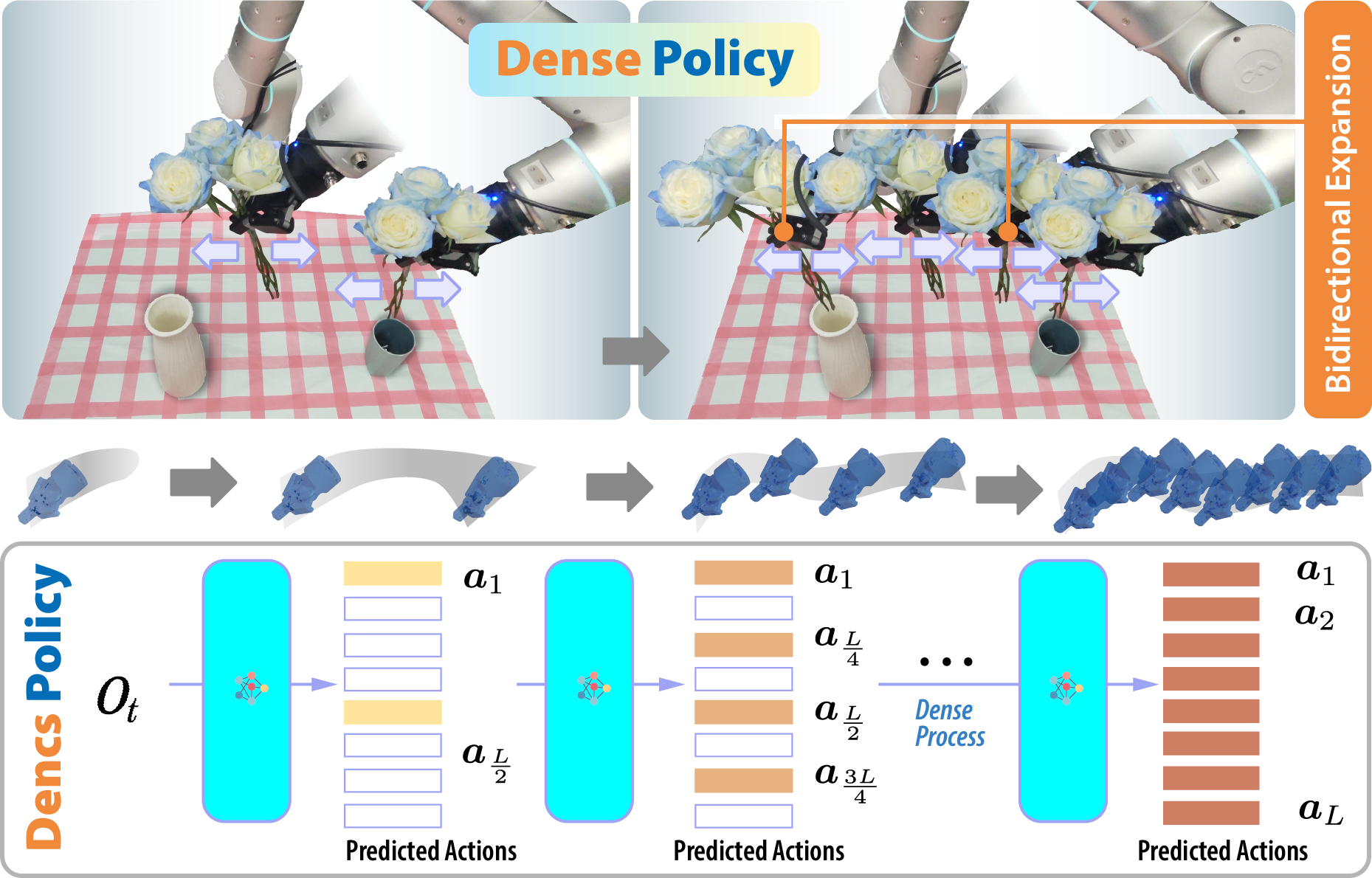
Dense Policy: Bidirectional Autoregressive Learning of Actions
ICCV, 2025
project
/
arXiv
a bidirectionally expanded learning approach that enhances auto-regressive policies for robotic
manipulation. It employs a lightweight encoder-only architecture to iteratively unfold the action
sequence from an initial single frame into the target sequence in a coarse-to-fine manner with
logarithmic-time inference.
|
|
|
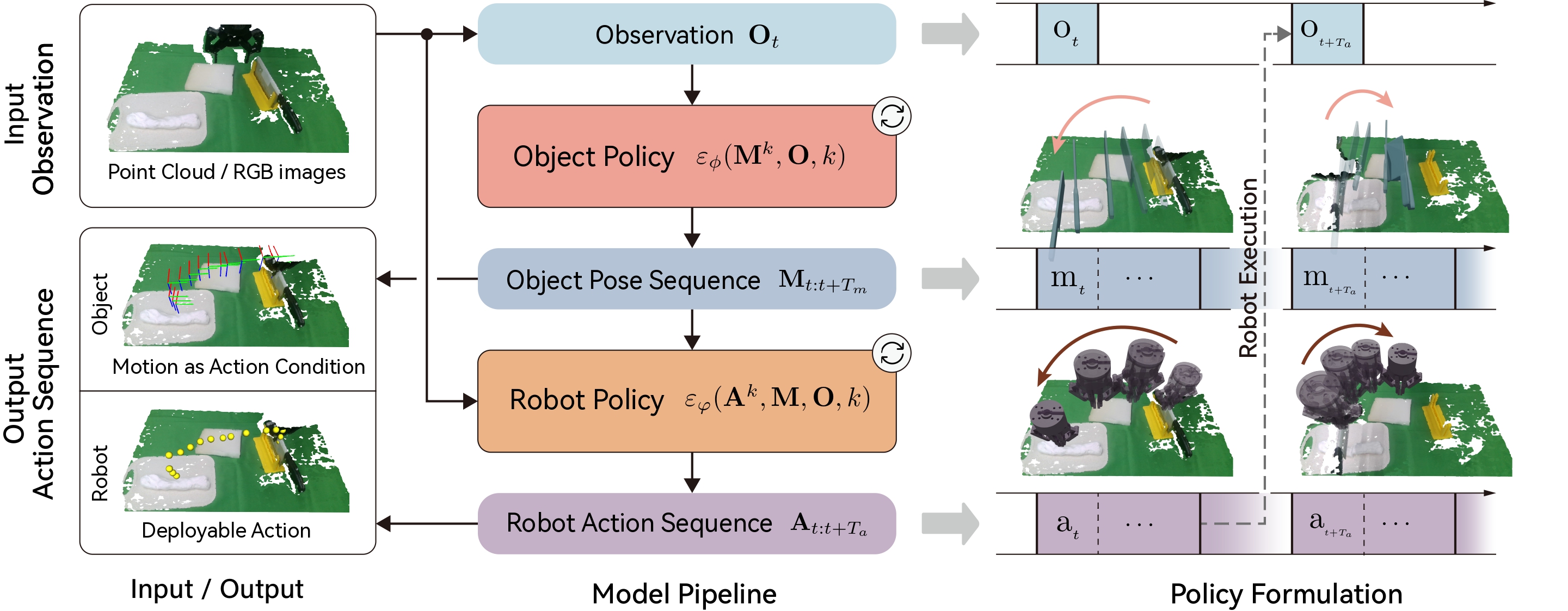
Motion Before Action: Diffusing Object Motion as Manipulation Condition
RA-L, 2025 & ICRA, 2026
project
/
arXiv
/
code
A two cascaded diffusion processes for object motion generation and robot action generation under
object
motion guidance.
|
|
|
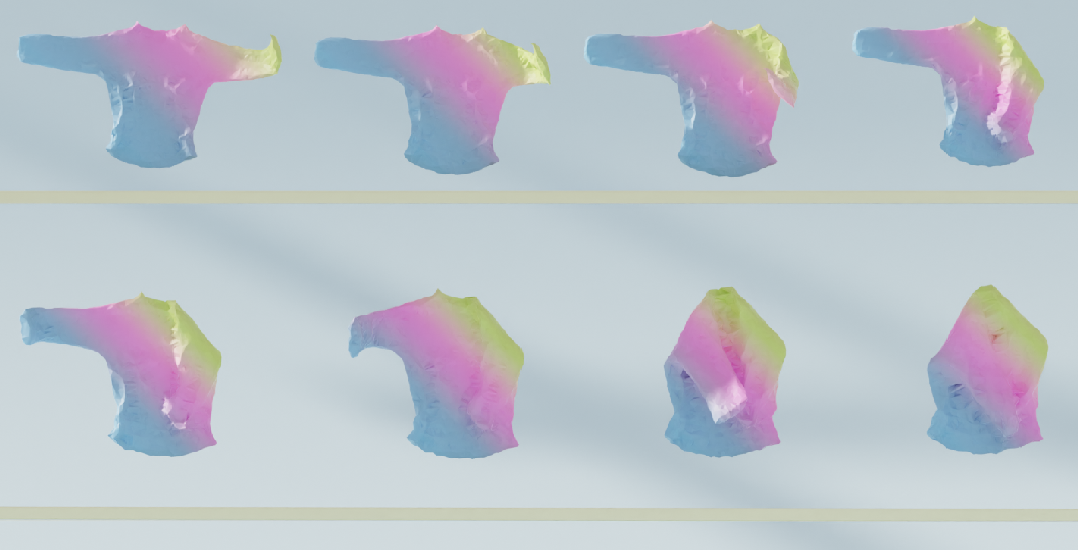
GaPT-DAR: Category-level Garments Pose Tracking via Integrated 2D Deformation and 3D
Reconstruction
CVPR, 2025
project
/
paper
a category-level garment pose tracking framework that transforms 3D point-wise learning into 2D
warping deformation learning using 3D-2D projection and 2D-3D reconstruction.
|
|
|
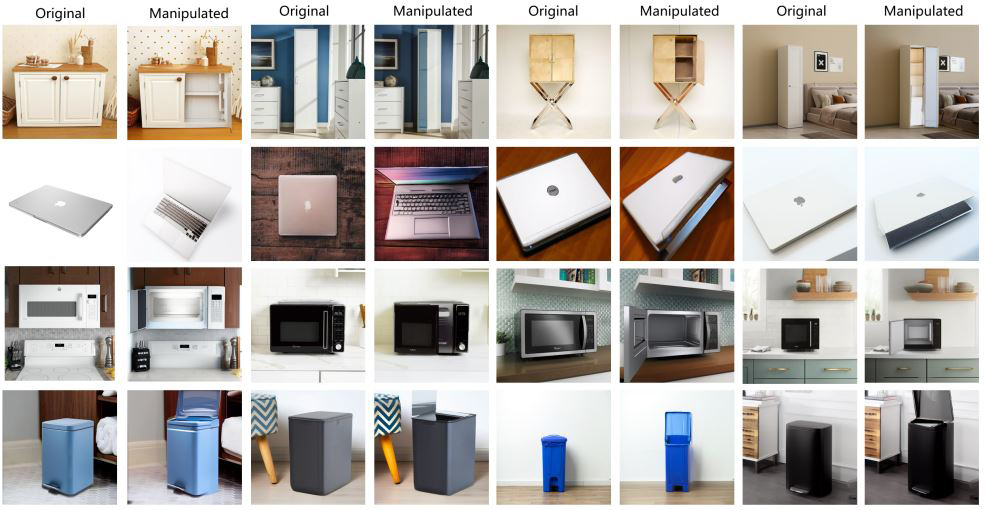
General Articulated Objects Manipulation in Real Images via Part-Aware Diffusion Process
NeurIPS, 2024
paper
Part-Aware Diffusion Model for manipulating articulated objects in real images.
It uses Abstract 3D Models for efficient object representation and dynamic feature maps to
transfer appearance while generating novel views or parts.
|
|
|
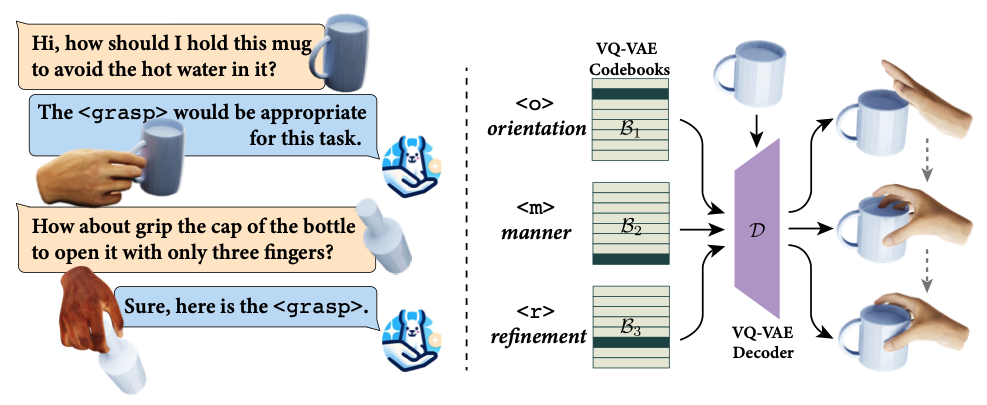
SemGrasp: Semantic Grasp Generation via Language Aligned Discretization
ECCV, 2024 (Oral Presentation)
project
/
arXiv
A MLLM-based method that infuses language instructions into grasp generation; & A new
language-pose
dataset, CapGrasp,
featuring detailed caption of grasping poses.
|
|
|
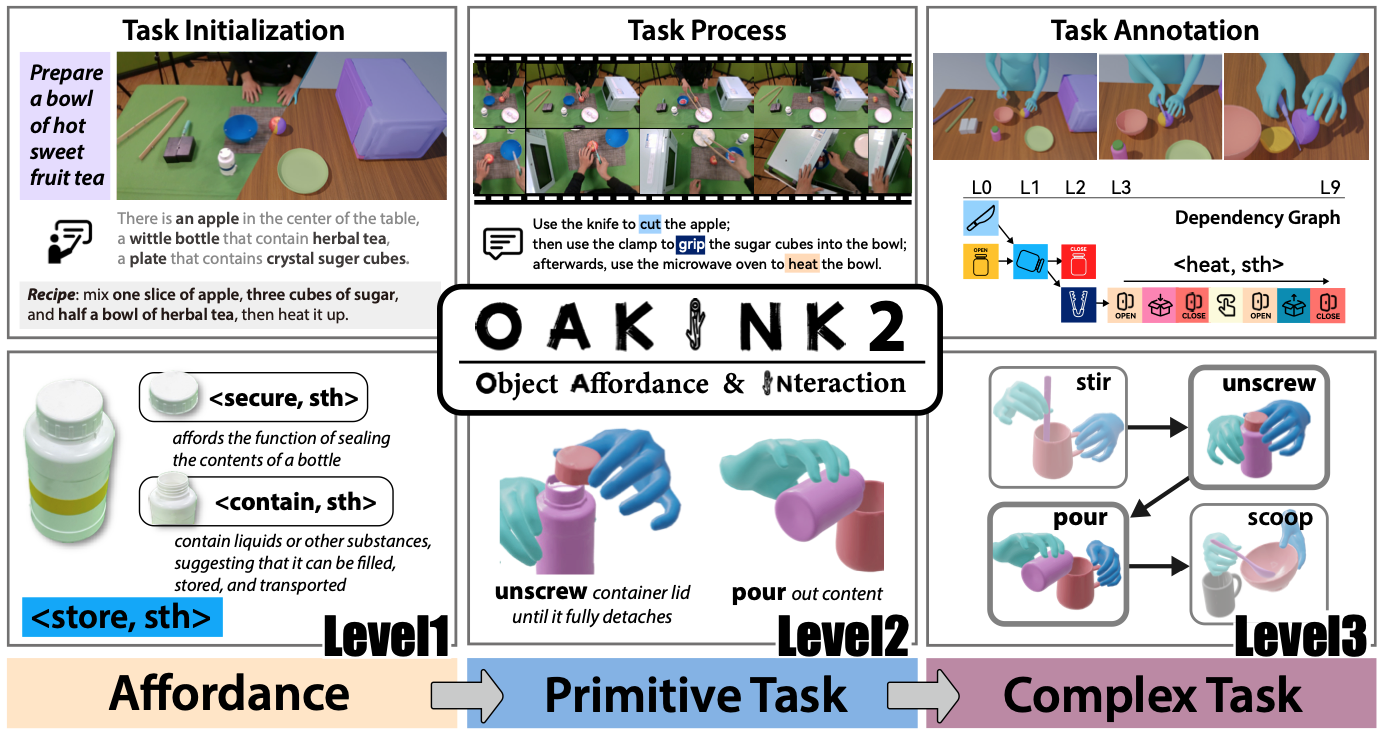
OakInk2: A Dataset of Bimanual Hands-Object Manipulation in Complex Task Completion
CVPR, 2024
project
/
arXiv
A 4D motion dataset focusing on bimanual object manipulation tasks involved in complex daily
activities; & A three-tiered task abstraction: Object Affordance, Primitive Task, and
Complex Task, to systematically organize manipulation tasks.
|
|
|
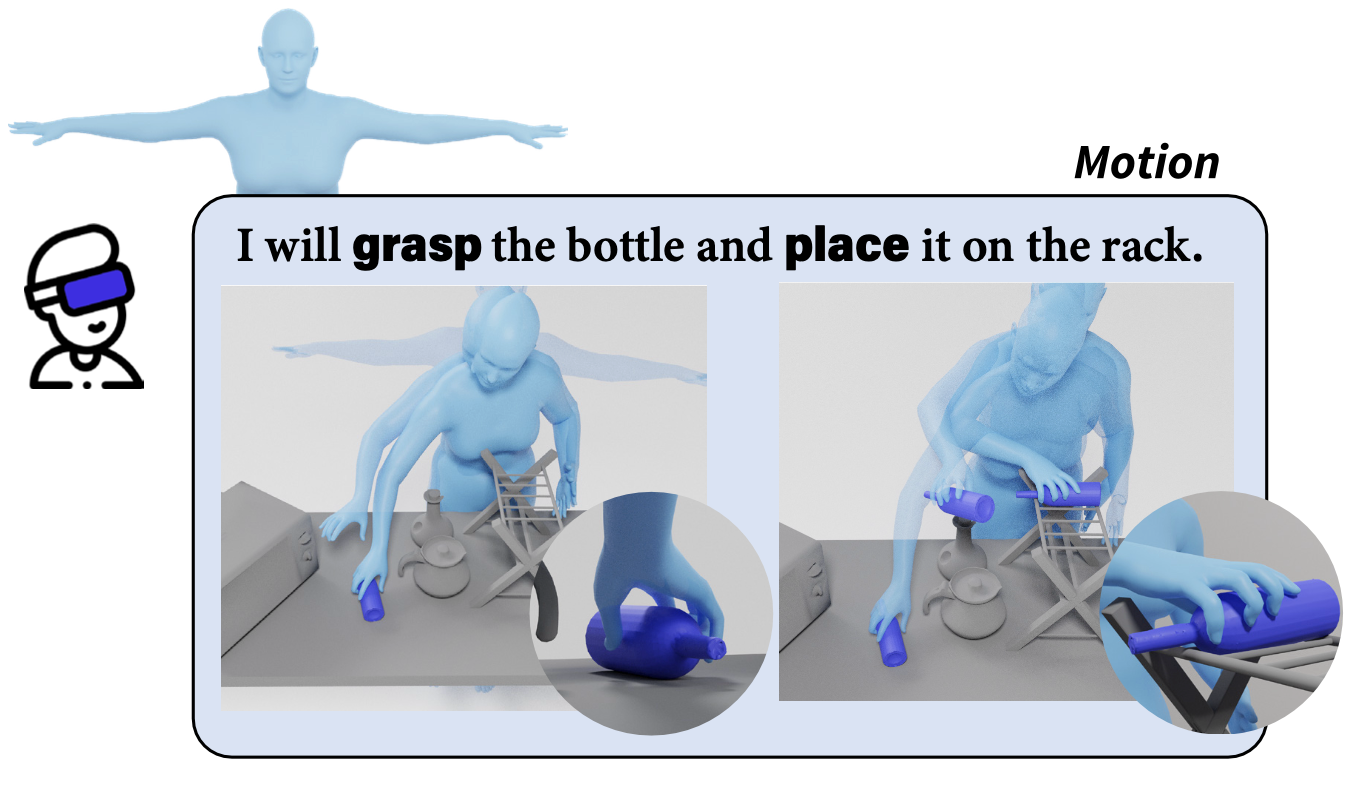
FAVOR: Full-Body AR-Driven Virtual Object Rearrangement Guided by Instruction Text
Kailin Li*,
Lixin Yang*,
Zenan Lin,
Jian Xu,
Xinyu Zhan,
Yifei Zhao,
Pengxiang Zhu,
Wenxiong Kang,
Kejian Wu,
Cewu Lu#
AAAI, 2024
project
/
arXiv
/
code
/
data
A full-body human motion dataset that captures text-guided desktop object rearrangement through
MoCap
and AR glasses; & A pipeline for generating avatar's motion of object rearrangement driven by
text instruction.
|
|
|
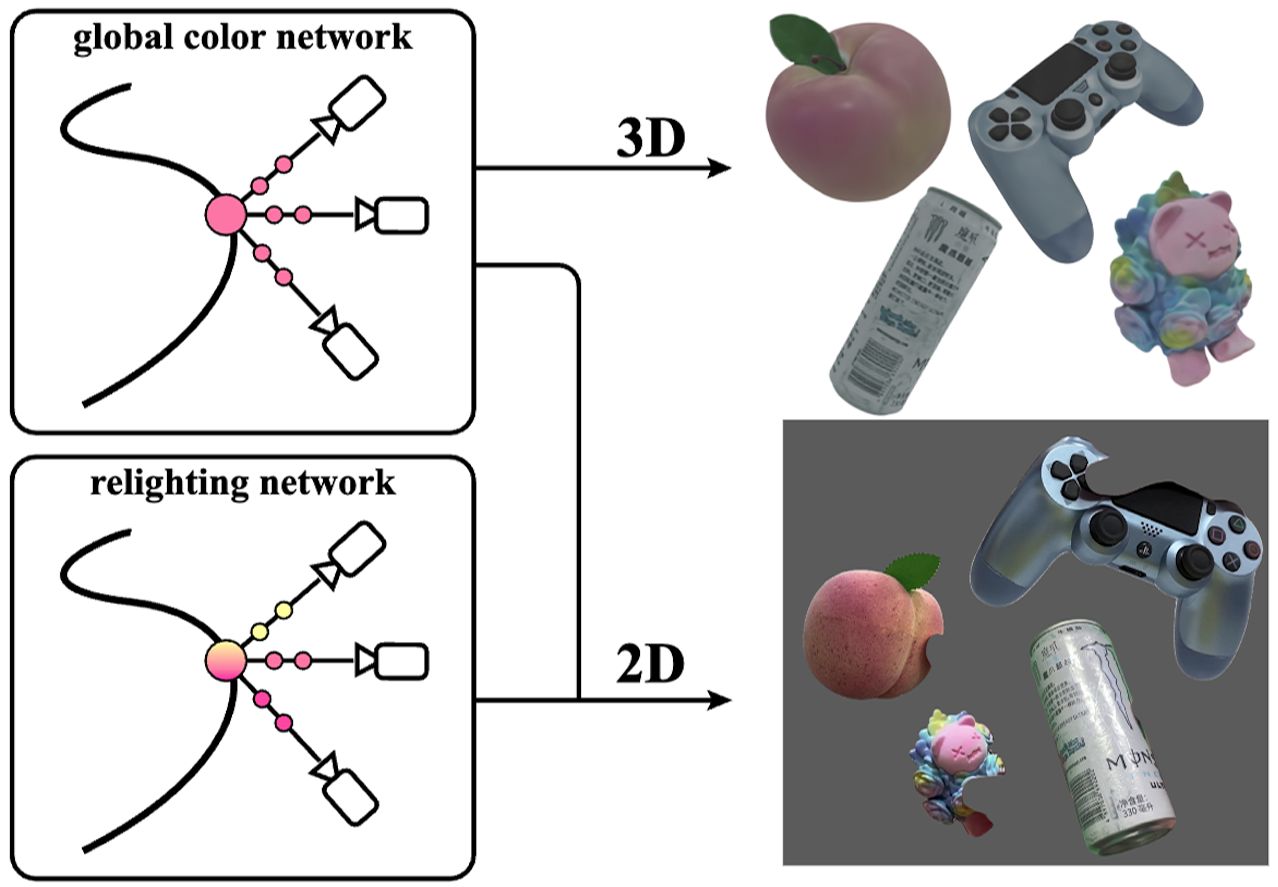
Color-NeuS: Reconstructing Neural Implicit Surfaces with Color
Licheng Zhong*,
Lixin Yang*,
Kailin Li,
Haoyu Zhen,
Mei Han,
Cewu Lu#
3DV, 2024
project
/
arXiv
/
code
/
data
Reconstructing 3D implicit surfaces with accurate, view-independent surface color by decoupling view-dependent shading from geometry. It combines a global color network and a relighting network to preserve volume rendering performance while enabling colored mesh extraction.
|
|
|
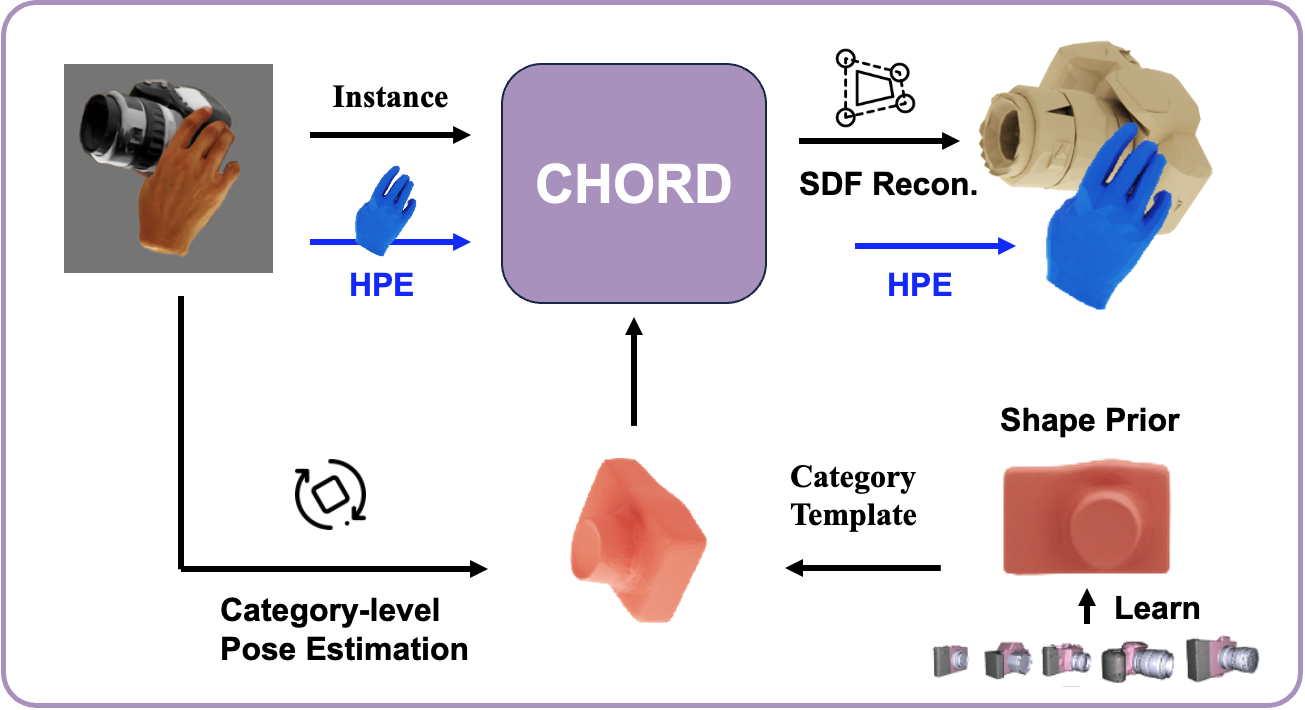
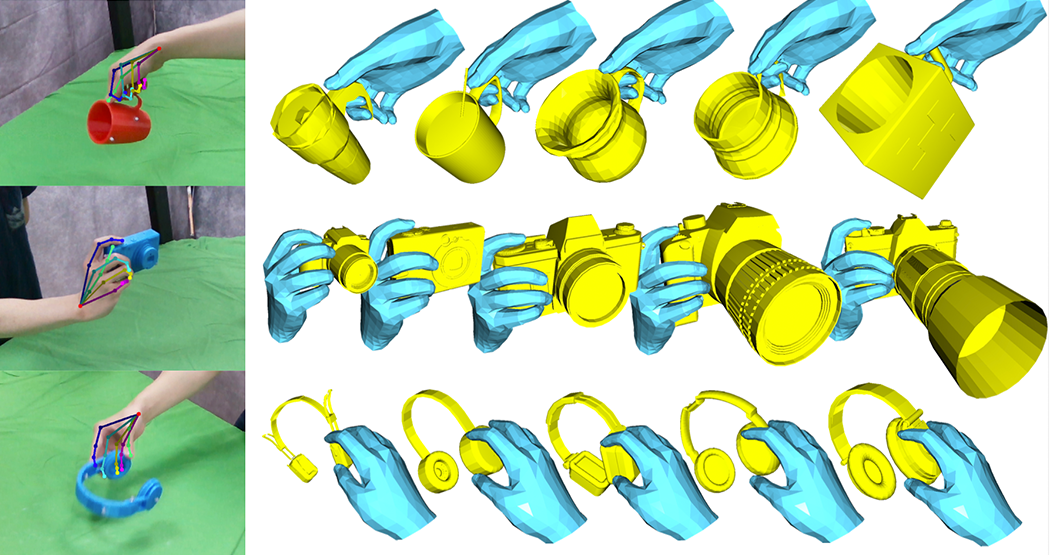
CHORD: Category-level in-Hand Object Reconstruction via Shape Deformation
Kailin Li*,
Lixin Yang*,
Haoyu Zhen,
Zenan Lin,
Xinyu Zhan,
Licheng Zhong,
Jian Xu,
Kejian Wu,
Cewu Lu#
ICCV, 2023
project
/
arXiv
/
code
/
tool
A single-view hand-held object reconstruction method that exploits the categorical shape prior to
reconstruct the shape of intra-class objects; & A new synthetic dataset, COMIC, that contains the
category-level collection of objects with diverse shape, materials, interacting poses, and viewing
directions.
|
|
|
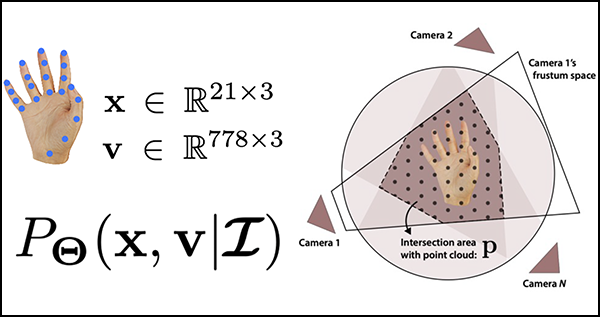
POEM: Reconstructing Hand in a Point Embedded Multi-view Stereo
Lixin Yang,
Jian Xu,
Licheng Zhong,
Xinyu Zhan,
Zhicheng Wang,
Kejian Wu,
Cewu Lu
CVPR, 2023
arXiv
/
code
A multi-view hand mesh recovery (HMR) method with Transformer. It leverages the "power of points",
including
Basis Points Set, point's positional encoding and point-Transformer, to unify and merge
information
from
sparsely arranged cameras.
|
|
|
DART: Articulated Hand Model with Diverse Accessories and Rich Textures
Daiheng Gao*,
Yuliang Xiu*,
Kailin Li*,
Lixin Yang*,
Feng Wang, Peng Zhang, Bang Zhang,
Cewu Lu,
Ping Tan
NeurIPS, 2022 - Datasets and Benchmarks Track
project
/
arXiv
/
code
/
video
A MANO-derived hand model that contains exquisite hand-crafted texture maps, varying in
appearance and covering different kinds of blemishes, make-ups, and accessories.
|
|
|
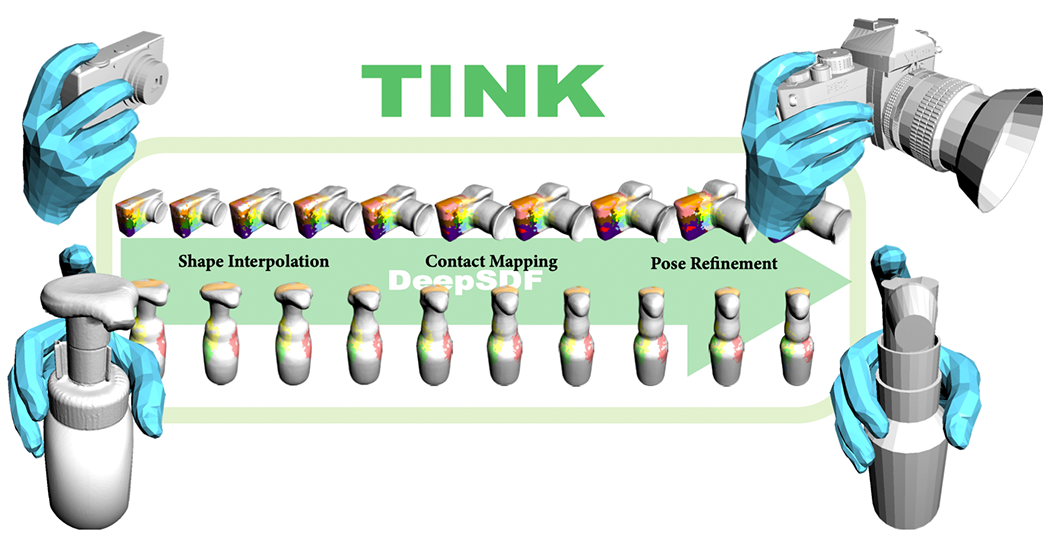
OakInk: A Large-scale Knowledge Repository for Understanding Hand-Object Interaction
Lixin Yang*,
Kailin Li*
Xinyu Zhan*,
Fei Wu,
Anran Xu,
Liu Liu,
Cewu Lu#
CVPR, 2022
project
/
paper
/
arXiv
/
code
A dataset that focuses on human grasp based on object's affordance.
It contains two knowledge base: 1) Object affordance knowledge (Oak) and 2) Interaction knowledge
(Ink).
A new model: Tink, for transferring interaction pose from one object to another.
|
|
|
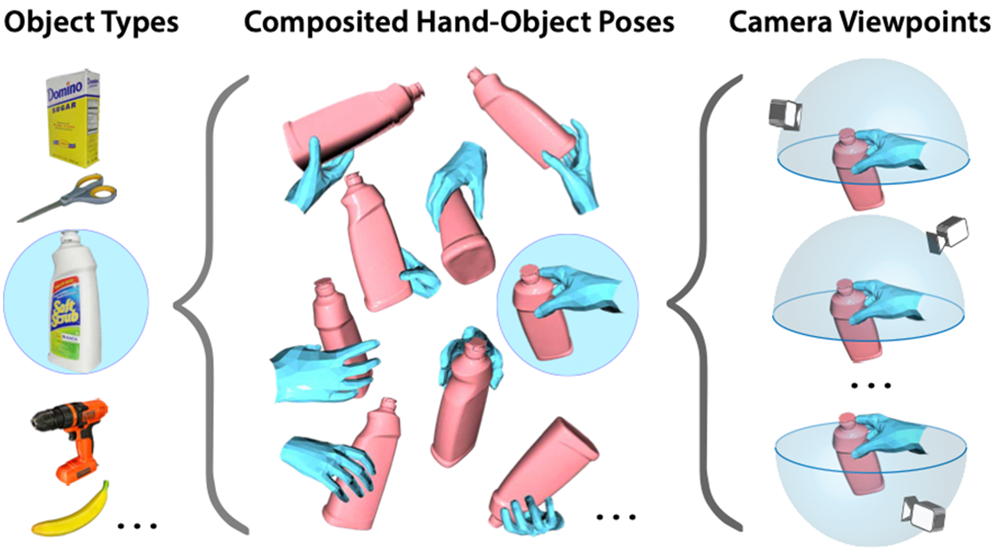
ArtiBoost: Boosting Articulated 3D Hand-Object Pose Estimation via Online Exploration
and Synthesis
Lixin Yang*,
Kailin Li*
Xinyu Zhan,
Jun Lv,
Wenqiang Xu,
Jiefeng Li,
Cewu Lu#
CVPR, 2022 (Oral Presentation)
paper
/
arXiv
/
code
An online data syhthesis tool for articulated hand(-object) pose estimation.
An grasping systhesis method that can generate dexterous hand grasping poses for arbitrary object.
|
|
|
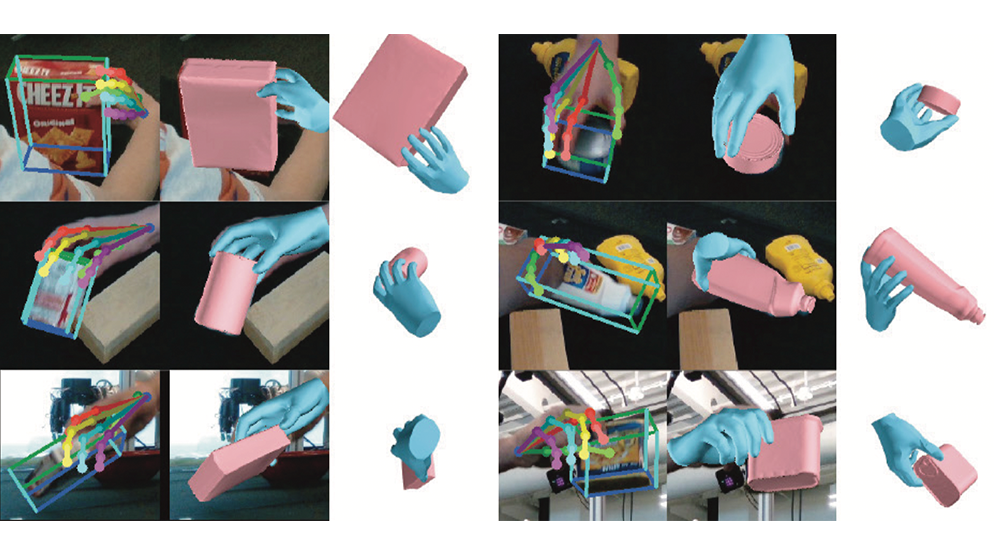
Learning a Contact Potential Field to Model the Hand-Object Interaction
Lixin Yang,
Xinyu Zhan,
Kailin Li,
Wenqiang Xu,
Junming Zhang,
Jiefeng Li,
Cewu Lu#
TPAMI, 2024
paper
A novel contact representation (CPF) that used to imporve physical hand-object interaction.
A hybrid learning-fitting framework (MIHO) that aligns the top-down pose estimation with bottom-up
contact
modeling.
|
|
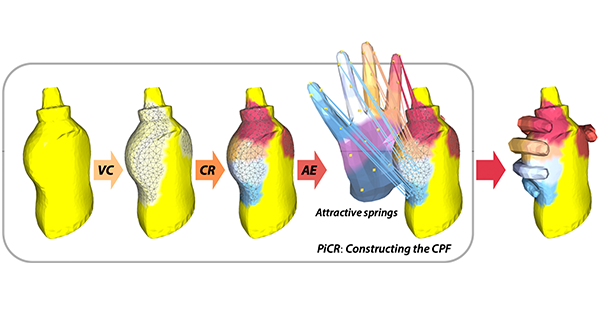
|
CPF: Learning a Contact Potential Field to Model the Hand-Object Interaction
Lixin Yang,
Xinyu Zhan,
Kailin Li,
Wenqiang Xu,
Jiefeng Li,
Cewu Lu#
ICCV, 2021
project
/
paper
/
supp
/
arXiv
/
code
/
知乎
A novel contact representation (CPF) that used to imporve physical hand-object interaction.
A hybrid learning-fitting framework (MIHO) that aligns the top-down pose estimation with bottom-up
contact
modeling.
|
|
|
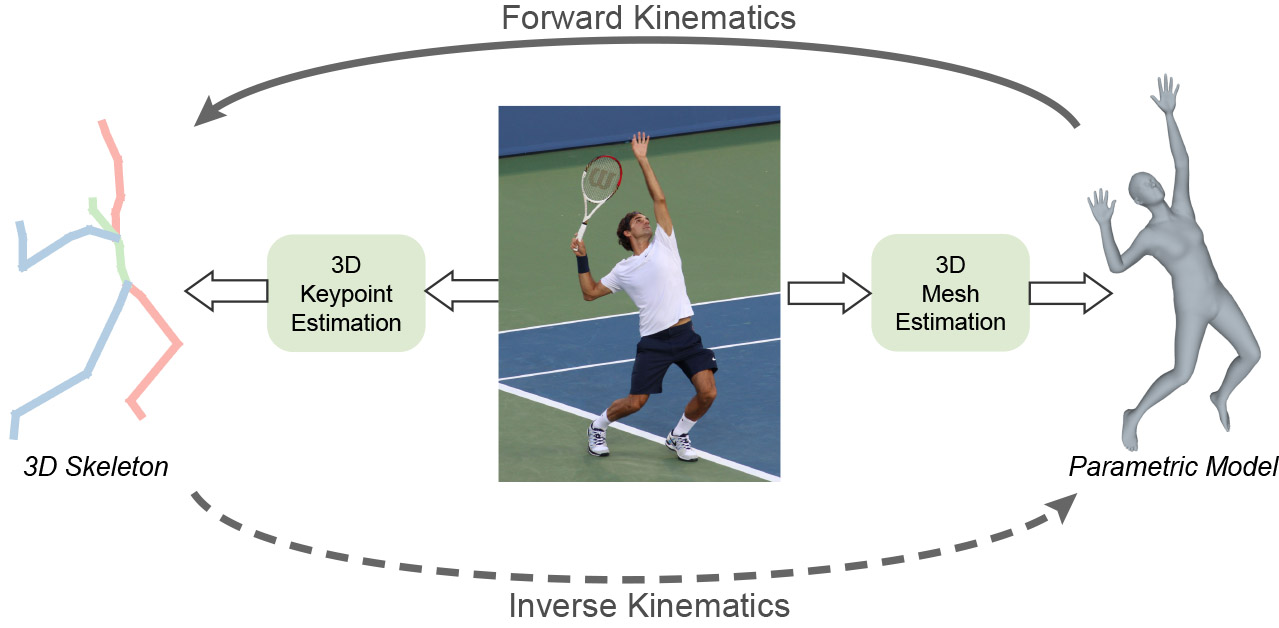
HybrIK-X: Hybrid Analytical-Neural Inverse Kinematics for Whole-body Mesh Recovery
Jiefeng Li,
Siyuan Bian,
Chao Xu,
Zhicun Chen,
Lixin Yang,
Cewu Lu#
TPAMI, 2025
arXiv
A hybrid inverse kinematics method for 3D body mesh recovery, combining 3D keypoint estimation and
body mesh
recovery. HybrIK-X extends this to model hands and faces, offering fast, accurate whole-body pose
estimation.
|
|
|
HybrIK: A Hybrid Analytical-Neural Inverse Kinematics Solution for 3D Human Pose and
Shape Estimation
Jiefeng Li,
Chao Xu,
Zhicun Chen,
Siyuan Bian,
Lixin Yang,
Cewu Lu#
CVPR, 2021
project /
paper
/
supp
/
arXiv /
code
|
|
|
HandTailor: Towards High-Precision Monocular 3D Hand Recovery
Jun Lv, Wenqiang Xu, Lixin Yang, Sucheng Qian, Chongzhao Mao, Cewu Lu
BMVC, 2021
paper /
arXiv /
code
|
|
|
BiHand: Recovering Hand Mesh with Multi-stage Bisected Hourglass Networks
Lixin Yang, Jiasen Li, Wenqiang Xu, Yiqun Diao, Cewu Lu
BMVC, 2020
paper /
arXiv /
code
|
Conference reviewer:
- Robotics: Science and Systems (RSS)
- IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
- IEEE International Conference on Computer Vision (ICCV)
- European Conference on Computer Vision (ECCV)
- ACM SIGGRAPH
- Conference on Neural Information Processing Systems (NeurIPS)
- International Conference on Learning Representations (ICLR)
- International Conference on Machine Learning (ICML)
- Association for the Advancement of Artificial Intelligence (AAAI)
- Conference of the European Association for Computer Graphics (Eurographics)
Journal reviewer:
- IEEE Transaction on Transactions on Pattern Analysis and Machine Intelligence (TPAMI)
- International Journal of Computer Vision (IJCV)
- Computer Vision and Image Understanding (CVIU)
- Pattern Recognition (PR)
Other Academic service:
国家自然科学基金青年科学基金项目(C类)2026.01 - 2028.12,国家自然科学基金委员会,主持
上海交通大学Explore X基金,2025.01-2027.12,上海交通大学,主持
上海市启明星扬帆计划,2024.12-2027.11,上海市科学技术委员会,主持
上海市科委“科技创新行动计划”项目,2023.12-2025.11,上海市科学技术委员会,课题负责人
2023年吴文俊人工智能科学技术奖,自然科学奖一等奖,2023,第四完成人(第一学生完成人)

website template
|