|
Bio. I’m a Research Assistant in Shanghai Jiao Tong University (SJTU). Starting from 2019, I have been in Machine Vision and Intelligence Group under the supervision of Prof. Cewu Lu. Prior to that, I received my M.S degree at the Intelligent Robot Lab in SJTU. My research interests include Computer Vision, Robotic Vision, 3D Vision and Graphics. Currently, I am focusing on modeling and imitating the hand manipulating objects, including 3D hand pose and shape estimation, (hand-held) object reconstruction, and grasp synthesis. I am also interested in NERF and motion synthesis. Join Us. I am looking for cooperation and self-motivated interns. Contact me if you are interested in the above topics Email / Google Scholar / GitHub / LinkedIn / Twitter / Resumé (PDF) |

|
|
|
- [2024.02] 🎉 One paper: OakInk2 is accepted by CVPR 2024 🇺🇸.
- [2024.02] 🎉 The Contact Potential Field is accepted by TPAMI.
- [2023.12] 🎉 One paper: FAVOR is accepted by AAAI 2024 🇨🇦.
- [2023.10] 🎉 One paper: Color-NeuS is accepted by 3DV 2024 🇨🇭.
- [2023.09] 📣 I will joint the CS department, SJTU as a research Assistant Professor in Fall 2023.
- [2023.08] 📣 I defend my doctoral thesis and earn my Ph.D!
- [2023.08] 👨🏻🏫 I am honored to be an invited speaker at the HANDS workshop at ICCV 2023.
- [2023.07] 🎉 One paper: CHORD is accepted by ICCV 2023 🇫🇷.
- [2023.06] 👨🏻🏫 Invited Talk at 智东西公开课 | 研讨会: 3D手部重建及具身智能交互. 视频 (中文).
- [2023.02] 🎉 One paper: POEM is accepted by CVPR 2023.
- [2022.10] 👩🏻❤️👨🏻 I have taken the wonderful journey of marriage alongside my cherished wife.
- [2022.10] 👨🏻🏫 Invited Talk at International Digital Economy Academy (IDEA), Thanks Ailing Zeng for hosting.
- [2022.09] 🎉 One paper: DART got accepted by NeurIPS 2022 - Datasets and Benchmarks Track.
- [2022.07] 👨🏻🏫 Invited Talk at 智东西公开课 | AI新青年讲座: 基于图像的手物交互重建与虚拟人手生成. 视频 (中文).
- [2022.04] 👨🏻🏫 Invited Talk at MPI-IS Perceiving Systems. Thanks Yuliang Xiu for hosting. (info).
- [2022.03] 🎉 Two paper were accepted by CVPR 2022: one Oral, one poster.
- [2021.07] 🎉 One paper got accepted by ICCV 2021.
View older entries
|
|
|
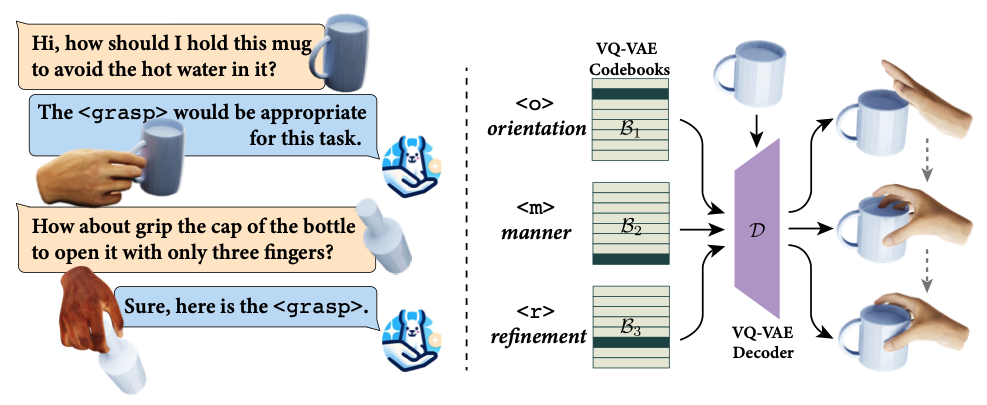
Kailin Li, Jingbo Wang, Lixin Yang, Cewu Lu, Bo Dai in arXiv, 2024 project / arXiv A MLLM-based method that infuses language instructions into grasp generation; & A new language-pose dataset, CapGrasp, featuring detailed caption of grasping poses. |
|
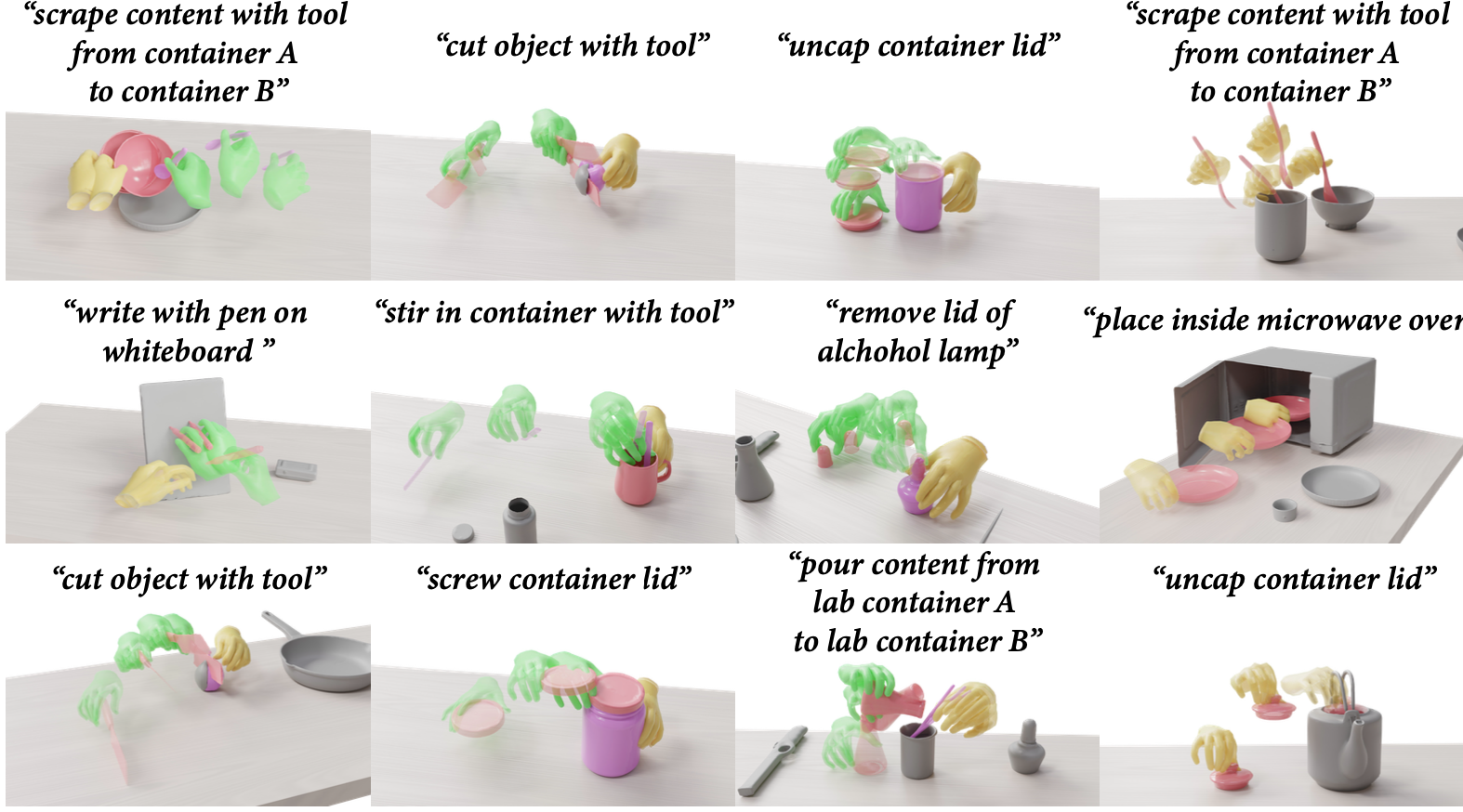
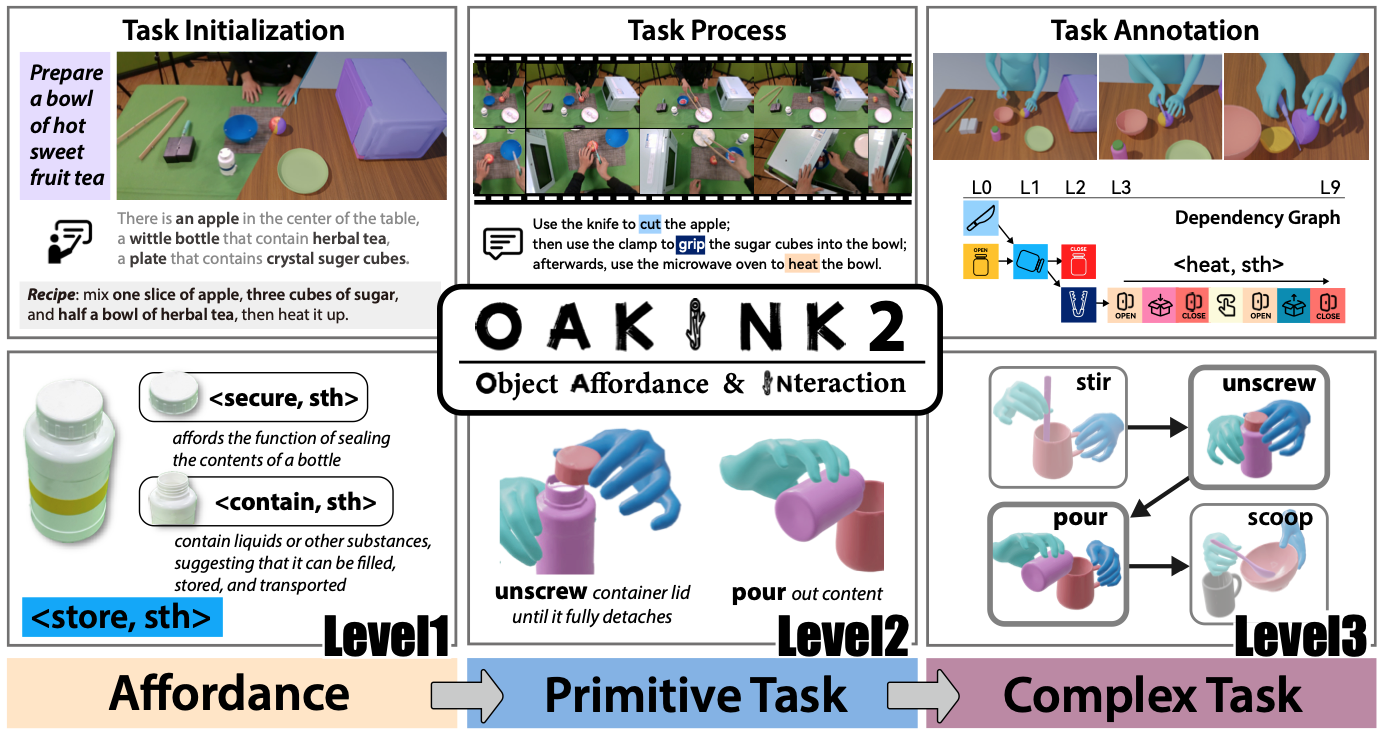
Xinyu Zhan* , Lixin Yang* , Yifei Zhao, Kangrui Mao, Hanlin Xu, Zenan Lin, Kailin Li, Cewu Lu CVPR, 2024 project / arXiv A 4D motion dataset focusing on bimanual object manipulation tasks involved in complex daily activities; & A three-tiered task abstraction: Object Affordance, Primitive Task, and Complex Task, to systematically organize manipulation tasks. |
|
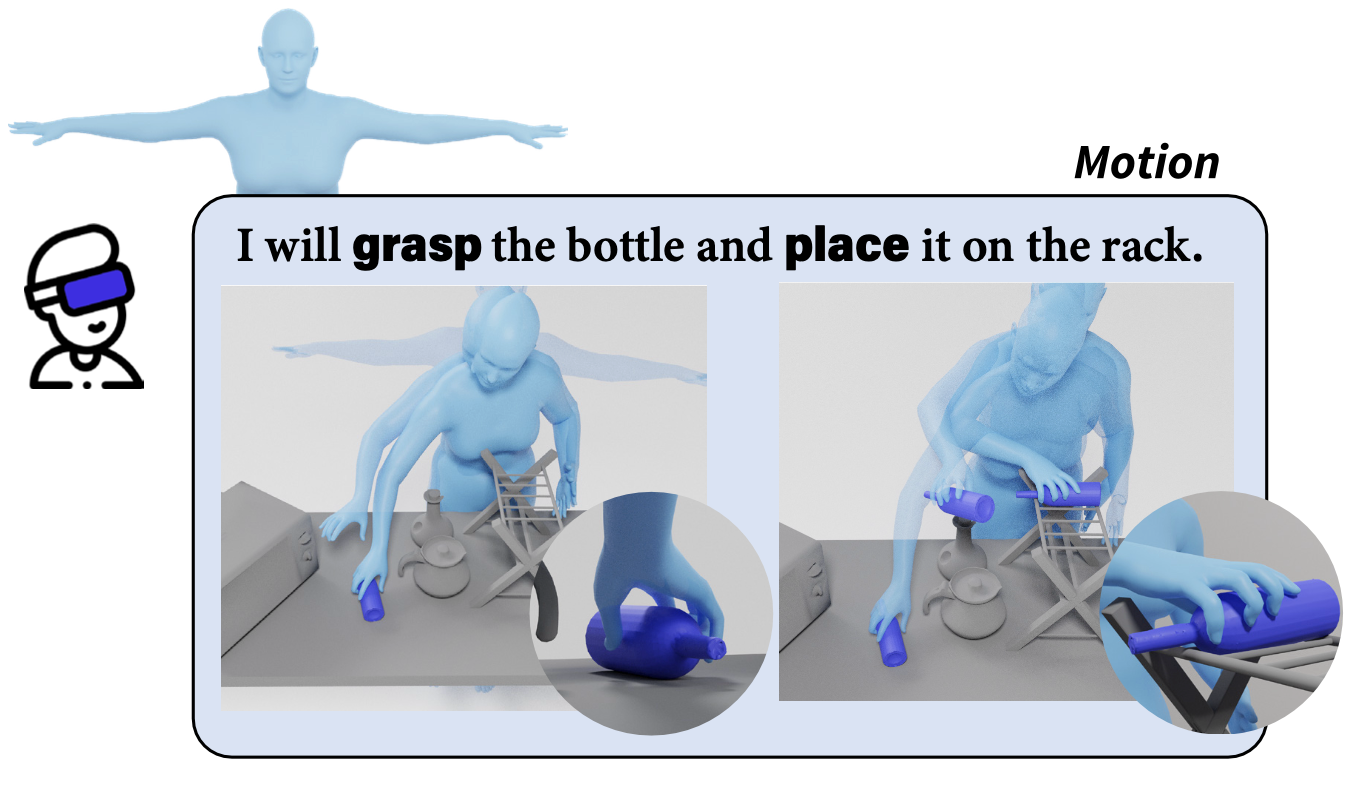
Kailin Li* , Lixin Yang* , Zenan Lin, Jian Xu, Xinyu Zhan, Yifei Zhao, Pengxiang Zhu, Wenxiong Kang, Kejian Wu, Cewu Lu AAAI, 2024 (coming): project / arXiv / code / data A full-body human motion dataset that captures text-guided desktop object rearrangement through MoCap and AR glasses; & A pipeline for generating avatar's motion of object rearrangement driven by text instruction. |
|
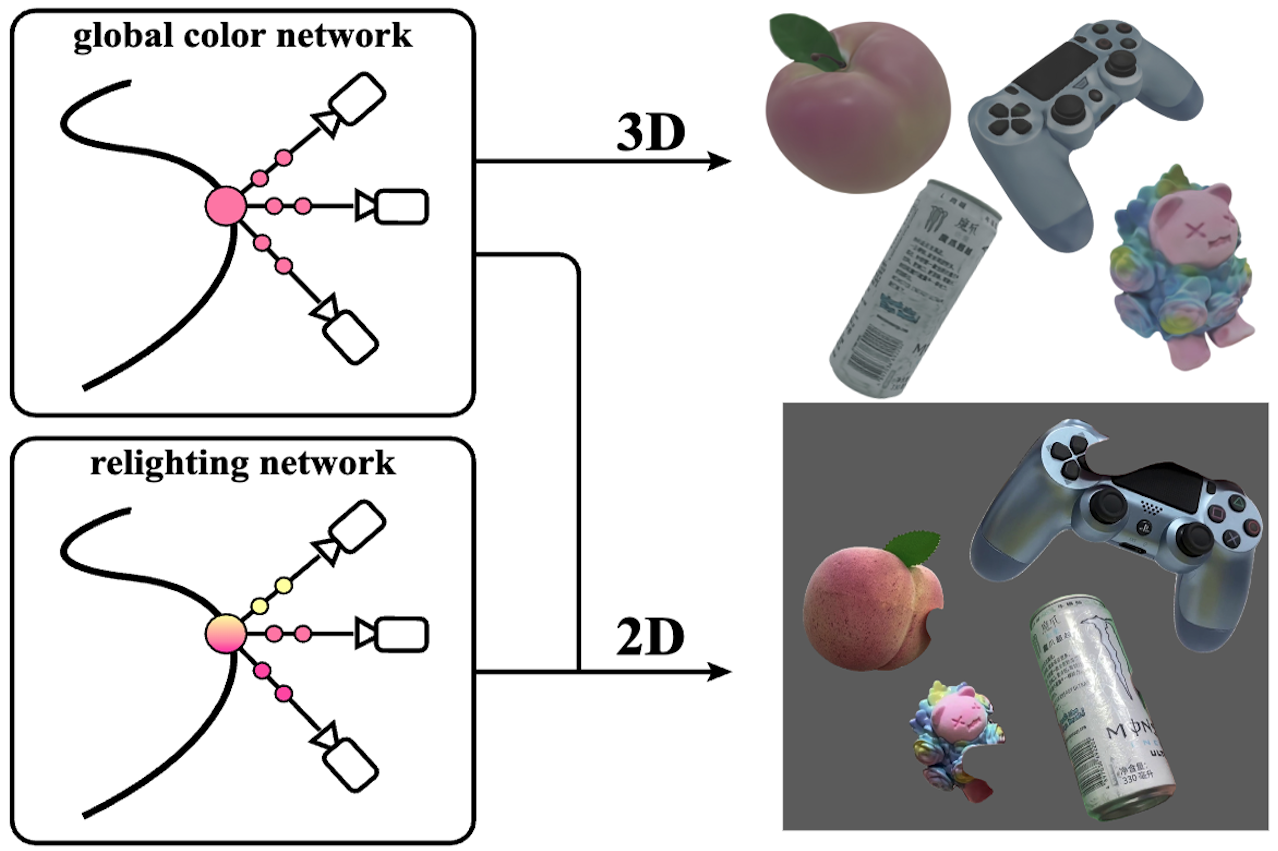
Licheng Zhong* , Lixin Yang* , Kailin Li , Haoyu Zhen, Mei Han, Cewu Lu 3DV, 2024 project / arXiv / code / data A NeuS-based reconstruction method for both object surface and texture. Can be used to reconstruct object with complex geometry and texture given a hand-held object video. |
|
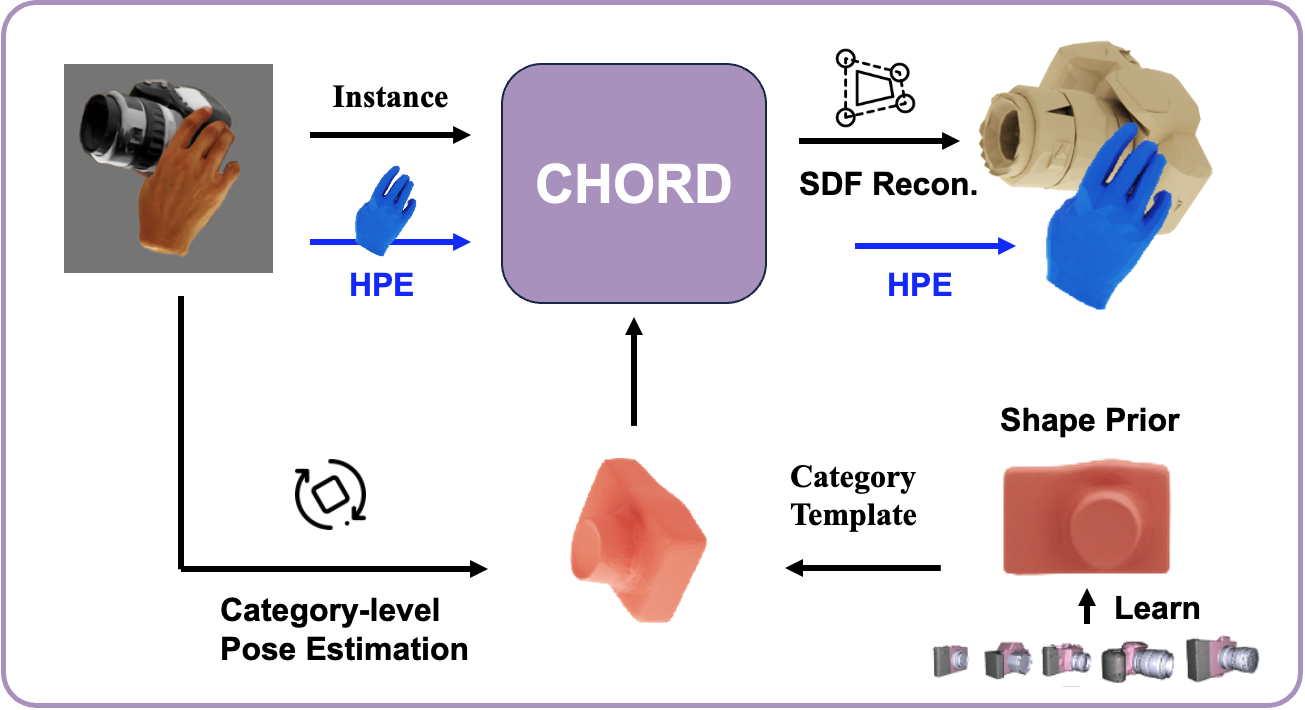
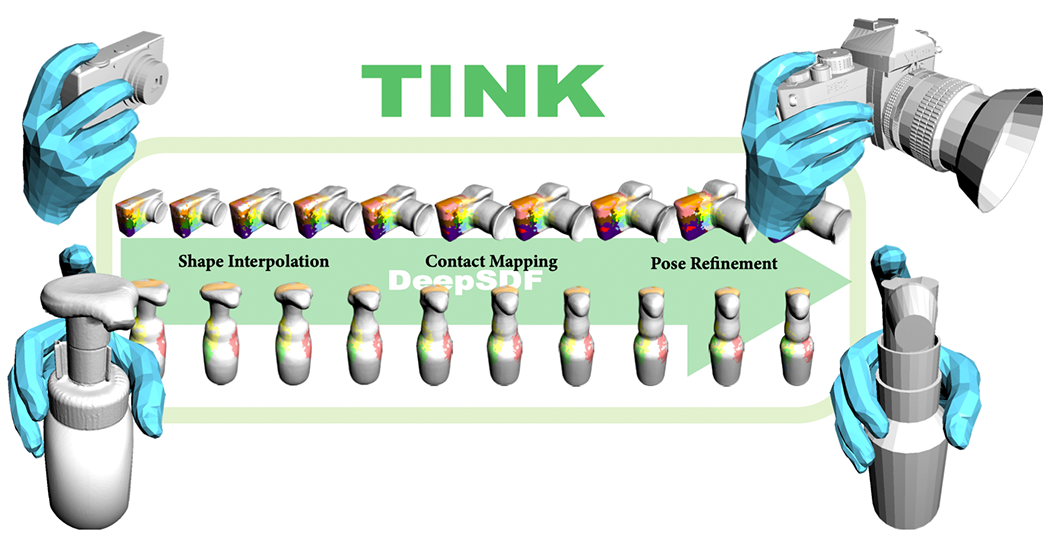
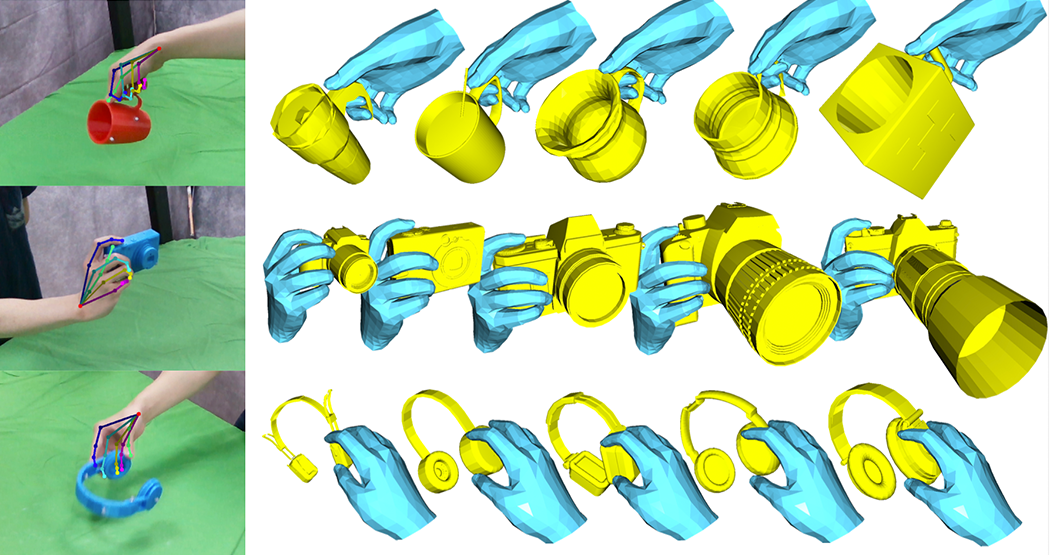
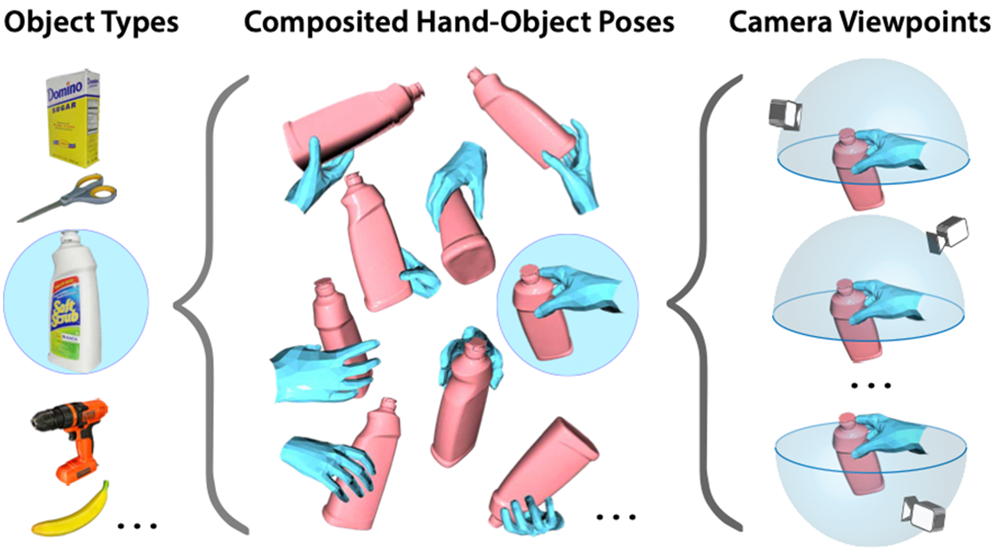
Kailin Li * , Lixin Yang* , Haoyu Zhen, Zenan Lin, Xinyu Zhan, Licheng Zhong, Jian Xu, Kejian Wu, Cewu Lu ICCV, 2023 project / arXiv / code (coming) / tool A single-view hand-held object reconstruction method that exploits the categorical shape prior to reconstruct the shape of intra-class objects; & A new synthetic dataset, COMIC, that contains the category-level collection of objects with diverse shape, materials, interacting poses, and viewing directions. |
|
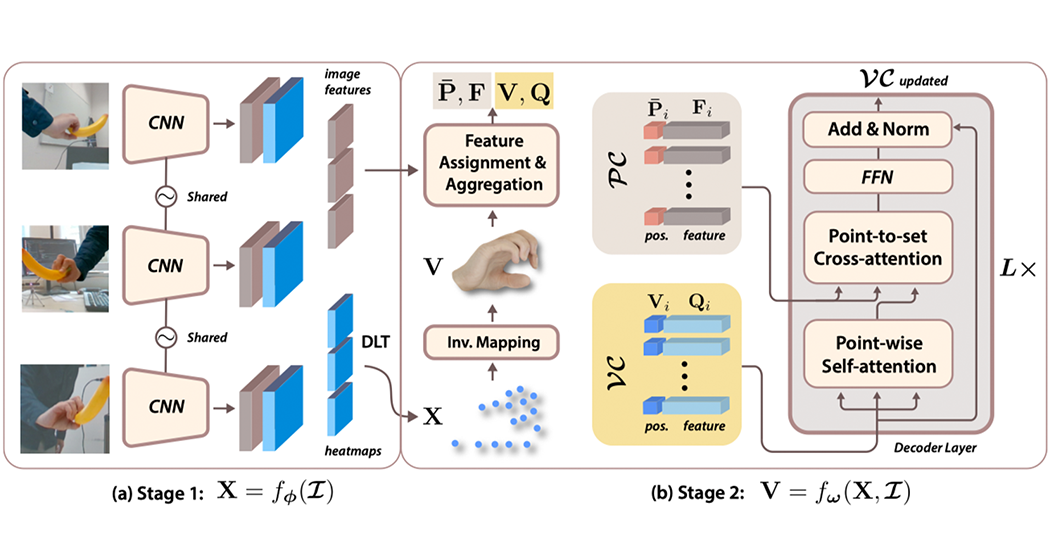
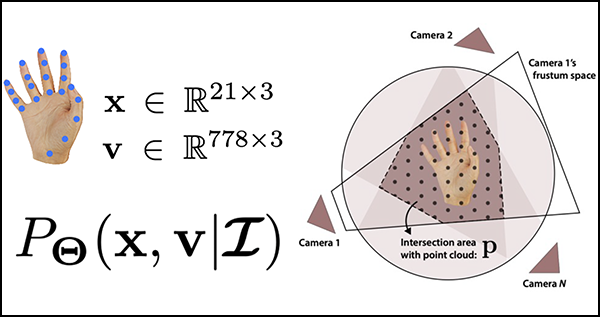
Lixin Yang, Jian Xu, Licheng Zhong, Xinyu Zhan, Zhicheng Wang, Kejian Wu, Cewu Lu CVPR, 2023 arXiv / code A multi-view hand mesh recovery (HMR) method with Transformer. It leverages the "power of points", including Basis Points Set, point's positional encoding and point-Transformer, to unify and merge information from sparsely arranged cameras. |

|
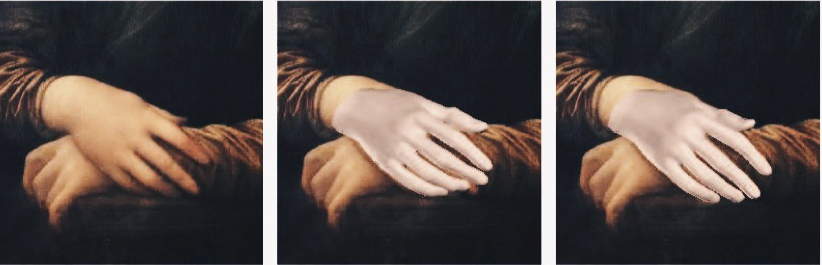
Daiheng Gao*, Yuliang Xiu*, Kailin Li*, Lixin Yang*, Feng Wang, Peng Zhang, Bang Zhang, Cewu Lu, Ping Tan NeurIPS, 2022 - Datasets and Benchmarks Track project / arXiv / code / video A MANO-derived hand model that contains 325 exquisite hand-crafted texture maps (vary in appearance and cover different kinds of blemishes, make-ups, and accessories). |
|
Lixin Yang*, Kailin Li* Xinyu Zhan*, Fei Wu, Anran Xu, Liu Liu, Cewu Lu (*=equal contribution) CVPR, 2022 project / paper / arXiv / code
A dataset that focuses on human grasp based on object's affordance.
It contains two knowledge base: 1) Object affordance knowledge (Oak) and 2) Interaction knowledge (Ink).
|
|
Lixin Yang*, Kailin Li* Xinyu Zhan, Jun Lv, Wenqiang Xu, Jiefeng Li, Cewu Lu (*=equal contribution) CVPR, 2022 (Oral Presentation) paper / arXiv / code An online data syhthesis tool for articulated hand(-object) pose estimation. An grasping systhesis method that can generate dexterous hand grasping poses for arbitrary object. |
|
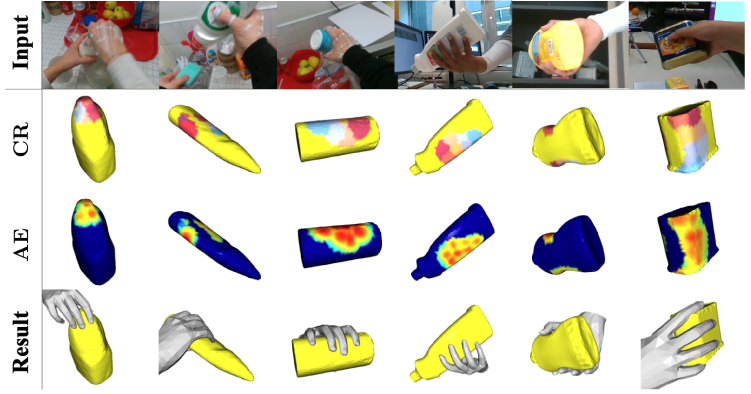
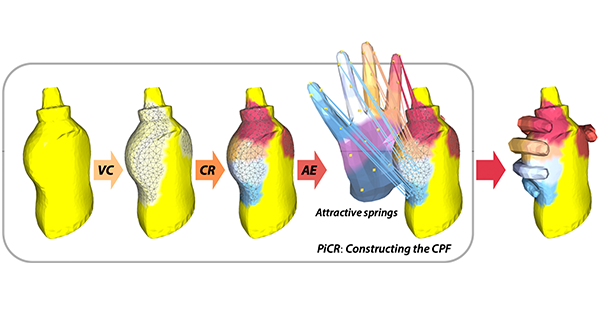
Lixin Yang, Xinyu Zhan, Kailin Li, Wenqiang Xu, Jiefeng Li, Cewu Lu ICCV, 2021 project / paper / supp / arXiv / code / 知乎 A novel contact representation (CPF) that used to imporve physical hand-object interaction. A hybrid learning-fitting framework (MIHO) that aligns the top-down pose estimation with bottom-up contact modeling. |
|
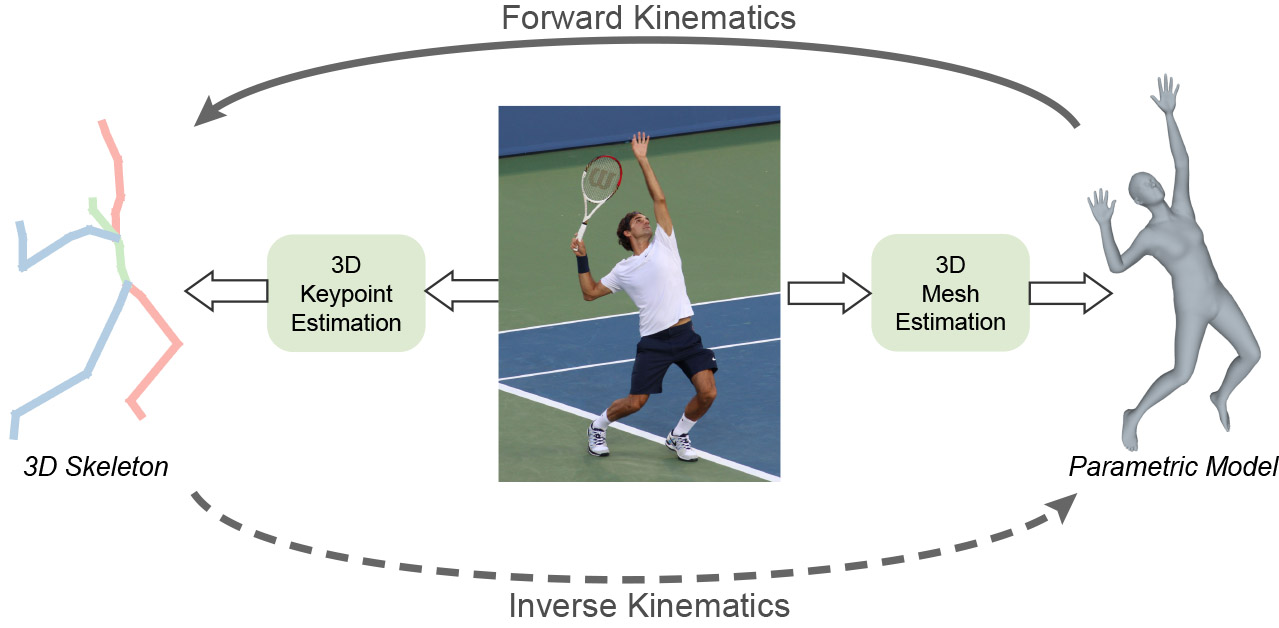
Jiefeng Li, Chao Xu, Zhicun Chen, Siyuan Bian, Lixin Yang, Cewu Lu CVPR, 2021 project / paper / supp / arXiv / code |
|
Jun Lv, Wenqiang Xu, Lixin Yang, Sucheng Qian, Chongzhao Mao, Cewu Lu BMVC, 2021 paper / arXiv / code |

|
Lixin Yang, Jiasen Li, Wenqiang Xu, Yiqun Diao, Cewu Lu BMVC, 2020 paper / arXiv / code |